
Normalmente, os robôs de controle remoto usam circuitos de RF, que apresentam as desvantagens de faixa de trabalho limitada, controle limitado e faixa de frequência limitada. Para superar essas desvantagens, Land Rover operado por telefone celular veículo robótico é usado. Ele fornece as vantagens de controle robótico, controladores livres de intrusão e até doze sistemas de controle, etc.
Embora as capacidades e aparência do robótica embutida variam muito, todos os robôs compartilham as características de uma estrutura mecânica móvel sob alguma forma de controle. O controle de robôs envolve três fases distintas que são percepção, processamento e ação. Normalmente, os sensores são montados no robô. A percepção e o processamento são feitos pelo microcontrolador de bordo, e a ação é realizada por meio de motores.
Veículo Robótico Land Rover Operado por Telefone Celular

Veículo Robótico Land Rover Operado por Telefone Celular por Edgefxkits.com
A intenção principal deste projeto é controlar um braço robótico que é montado em um veículo robótico por meio de um telefone celular. Ele fornece uma ampla faixa de trabalho e controle robusto, etc.
Diagrama de blocos do veículo robótico Land Rover operado por telefone celular:

Diagrama de blocos de Land Rover operado por telefone celular
Os principais blocos de construção são microcontrolador, celular, decodificador DTMF e circuito driver DC-Motor. O celular é a parte mais importante de todo o sistema porque todo o sistema funciona e é ativado pelo celular. DTMF (multifrequência de tom dual) recebe o sinal de entrada do telefone celular e o decodifica, e então gera uma saída digital de 4 bits do Microcontrolador 8051 . Quando o decodificador DTMF fornece uma saída digital, ele também gera uma interrupção todas as vezes.
O microcontrolador é o coração de todo o sistema, pois executa todas as ações de controle. O microcontrolador depende do código que é gerado pelo decodificador DTMF para mover o rover para a direita ou esquerda e para frente ou para trás girando ambos os motores DC. O driver do motor DC recebe sinais de ativação do microcontrolador em termos de lógica baixa ou alta, então amplifica e gira dois motores em ambas as direções.
O controle do robô envolve principalmente quatro fases diferentes: percepção, processamento da ação e detecção. No estágio de percepção, se o celular acoplado ao robô receber uma chamada, o pressionamento da tecla no celular decodifica o tom DTMF gerado. Em seguida, o chip decodificador recebe o sinal de áudio do celular e, a seguir, converte o tom DTMF em um código binário, que é alimentado ao microcontrolador. Neste projeto, um MT88710 IC é usado como um decodificador DTMF. Na etapa de processamento, o microcontrolador processa o código binário que é recebido do decodificador DTMF. O O microcontrolador é pré-programado em 'C' para executar esta tarefa particular de acordo com os bits de entrada.
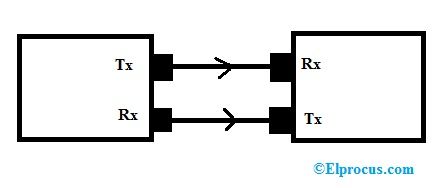
No estágio de ação, a rotação dos motores depende da entrada dada pelo microcontrolador. Dois motores CC, cada um de 30 RPM, são usados para o Landrover e são acionados pelo IC do driver do motor. Na detecção do palco, e para detecção de obstáculos, um transmissor e receptor infravermelho são usados junto com a campainha. Quando o obstáculo chega na frente do robô, o transmissor IR transmite os raios IR no objeto, então o objeto reflete os raios IR para o receptor IR. O receptor IR então recebe os raios IR para ativar a campainha.
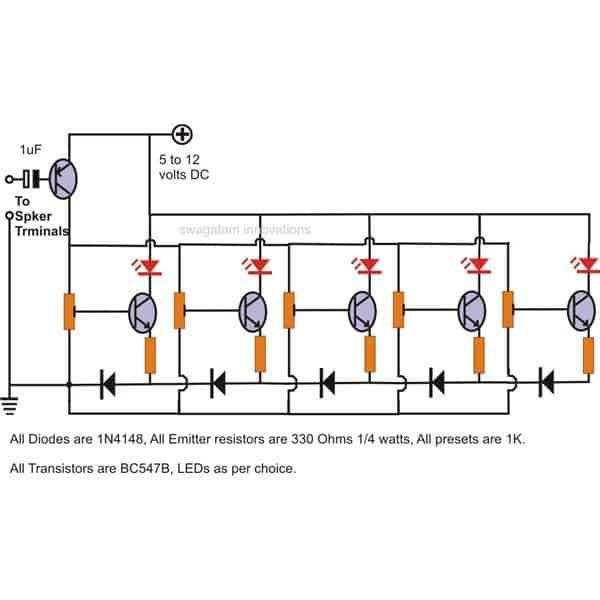
Diagrama de circuito do veículo robótico land rover operado por telefone celular:
Os principais componentes deste landrover robótico operado por celular são microcontrolador, driver de motor e decodificador DTMF. Um decodificador DTMF da série MT8870 é usado neste projeto, que usa técnicas de contagem digital para detectar os 16 pares de tons DTMF em uma saída de código de 4 bits. O circuito de tom de discagem integrado elimina a pré-filtragem. Se um sinal de entrada for dado no pino 2, a configuração de entrada é reconhecida como efetiva. O sinal de decodificação de 4 bits do tom DTMF é transferido para o pino 11 por meio da saída do pino 14. Esses pinos são conectados aos pinos do microcontrolador Pao, Pa1, Pa2 e Pa3. A saída do microcontrolador dos pinos da porta PD0 a PD3 e PD7 são alimentados para as entradas IN1, IN4 e habilita os pinos EN1, EN2 do motor-driver L293D IC para acionar os dois motores DC .

Diagrama de circuito do Land Rover operado por telefone celular
Neste circuito, a chave S1 é usada para reset manual. A saída do microcontrolador não é suficiente para acionar os motores DC, então drivers de corrente são necessários para a rotação do motor. O driver do motor L293D é projetado para fornecer correntes de acionamento bidirecionais de até 600 mA em tensões de 4,5 V a 36 V, o que o torna mais fácil de acionar os motores DC. O driver do motor L293D consiste em quatro drivers. Os pinos IN1 a IN4 e OUT1 e OUT4 são os pinos de entrada e saída do driver 1 ao driver 4. Os drivers 1,2,3 e 4 são habilitados pelo pino 1 (EN1) e pino 9 (EN2) de habilitação. Quando a entrada EN1 habilitada (pino1) está alta, os drivers 1 e 2 são habilitados. Da mesma forma, a entrada de habilitação EN2 (pin9) habilita os drivers 3.
Vantagens e desvantagens:
As vantagens do landrover robótico operado por celular incluem provisionamento de controle sem fio e sistema de vigilância, navegação veicular baseada na tecnologia 3G e alcance operacional ilimitado com base na rede do celular. As desvantagens incluem: o custo porque o faturamento do celular é alto descarga de baterias de celular : o problema de descarregamento associado às baterias como a perda de carga das baterias devido à descarga rápida porque a carga é de alta adaptabilidade: o sistema não é adaptável a todos os celulares, mas aqueles com fone de ouvido acoplado só podem ser usados.
Assim, este projeto de robô operado por celular é muito útil em aplicações militares para controlar veículos militares usando um telefone celular. No futuro, podemos detectar a posição dos inimigos organizando um câmera sem fio para o veículo robótico Land Rover. Este projeto também pode ser útil para os acadêmicos, pois os alunos podem aprender várias terminologias e princípios propostos neste projeto. Este projeto ajudará os alunos a adicionar seus pensamentos e ideias inovadoras para desenvolver projetos de robótica .
Créditos fotográficos:
- Land Rover operado por telefone celular por santoshbanisetty
- Diagrama de circuito do Land Rover operado por telefone celular por garagem de engenheiros






{kind=link}