O artigo apresentado aqui explica um circuito controlador de velocidade do motor CA de malha fechada muito simples que pode ser usado para controlar as velocidades do motor CA monofásico.
O circuito é muito barato e usa componentes eletrônicos comuns para as implementações necessárias. A principal característica do circuito é ser do tipo malha fechada, o que significa que a velocidade ou o torque do motor nunca podem ser afetados pela carga ou pela velocidade do motor neste circuito, pelo contrário o torque é indiretamente proporcional ao a magnitude da velocidade.
Operação do circuito:
Referindo-se ao diagrama de circuito do controlador de motor CA de circuito fechado monofásico proposto, as operações envolvidas podem ser entendidas através dos seguintes pontos:
Para os semiciclos positivos da entrada CA, o capacitor C2 é carregado através do resistor R1 e do diodo D1.

O carregamento de C2 persiste até que a voltagem através deste capacitor se torne equivalente à voltagem zener de simulação da configuração.
O circuito conectado ao transistor T1 simula efetivamente a operação de um diodo zener.
A inclusão do potenciômetro P1 permite ajustar a tensão deste “diodo zener”. Precisamente falando, a tensão desenvolvida em T1 é literalmente determinada pela relação entre os resistores R3 e R2 + P1.
A voltagem através do resistor R4 é sempre mantida igual a 0,6 volts que é igual à voltagem de condução necessária da voltagem do emissor de base de T1.
Portanto, isso significa que a tensão zener explicada acima deve ser igual ao valor que pode ser adquirido resolvendo a expressão:
(P1 + R2 + R3 / R3) × 0,6
Lista de peças para o circuito do controlador de velocidade do motor CA de circuito fechado acima
- R1 = 39K,
- R2 = 12K,
- R3 = 22K,
- R4 = 68K,
- P1 = 220K,
- Todos os diodos = 1N4007,
- C1 = 0,1 / 400V,
- C2 = 100uF / 35V,
- T1 = BC547B,
- SCR = C106
- L1 = 30 voltas de fio 25 SWG em uma haste de ferrite de 3 mm ou 40 uH / 5 watts
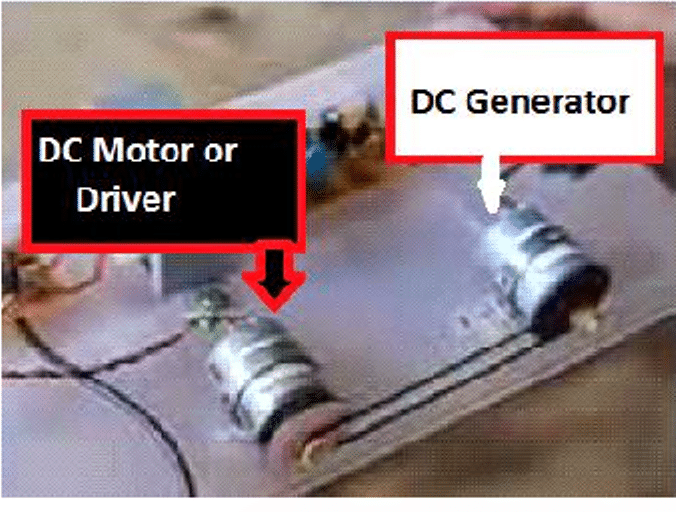
Como a carga é posicionada por um motivo especial
Uma investigação cuidadosa revela que o motor ou a carga não é introduzido na posição usual, em vez disso, é conectado logo após o SCR, em seu cátodo.
Isso faz com que um recurso interessante seja introduzido com este circuito.
A posição especial acima do motor dentro do circuito torna o tempo de disparo do SCR dependente da diferença de potencial entre o EMF traseiro do motor e a “tensão zener” do circuito.
Isso significa simplesmente que quanto mais o motor está carregado, mais rápido o SCR dispara.
O procedimento simula bastante um funcionamento do tipo malha fechada, onde o feedback é recebido na forma de um back EMF gerado pelo próprio motor.
No entanto, o circuito está associado a uma pequena desvantagem. A adoção de um SCR significa que o circuito pode lidar com apenas 180 graus de controle de fase e o motor não pode ser controlado em toda a faixa de velocidade, mas apenas em 50% dela.
Outra desvantagem associada devido à natureza barata do circuito é que o motor tende a produzir soluços em velocidades mais baixas, no entanto, à medida que a velocidade é aumentada, esse problema desaparece completamente.
A função de L1 e C1
L1 e C1 são incluídos para verificar os RFs de alta frequência gerados devido ao corte de fase rápido pelo SCR.
Nem é preciso dizer que o dispositivo (SCR) deve ser montado em um dissipador de calor adequado para resultados ideais.
Circuito controlador de velocidade de perfuração EMF traseiro
Este circuito é usado principalmente para controlar a velocidade constante de motores bobinados em série menores, como encontrado em várias furadeiras elétricas, etc. O torque e a velocidade são controlados pelo potenciômetro P1. Esta configuração de potenciômetro especifica o quão minuciosamente o triac pode ser acionado.

Quando a velocidade do motor cai abaixo do valor predefinido (com a carga conectada), o EMF traseiro do motor diminui. Como resultado, a tensão em torno de R1, P1 e C5 aumenta, de modo que o triac é ativado mais cedo e a velocidade do motor tende a aumentar. Uma certa proporção de estabilidade de velocidade é alcançada desta maneira.
Anterior: Como gerar eletricidade a partir da água do mar - 2 métodos simples Próximo: Circuito de interruptor de controle remoto de telefone celular baseado em GSM