A postagem detalha um circuito controlador de motor ajustável com retardo para que o motor possa ser atribuído a um tempo de operação predeterminado fixo ou tempo de retardo para DESLIGADO. A ideia foi solicitada pelo Sr. Cribey
Especificações técnicas
Eu realmente gosto de seu site. É muito útil para muitas pessoas.
Estou tentando controlar a velocidade e o tempo de um motor de 9 V com engrenagens 36RPM em que ele está ligado apenas na direção reversa (anti-horário).
Na verdade, eu gostaria de usar um plugue adaptador USB de 5 V (como os que usamos em nossos telefones) para ligar o motor em uma determinada velocidade e por um determinado período de tempo.
AMBOS a velocidade e o tempo precisam ser ajustáveis (potenciômetros, talvez?) Para obter o tempo exato para que o motor seja ligado e na velocidade escolhida corretamente.
Qualquer ajuda seria muito apreciada.
Cumprimentos,
Cribey

O design
O circuito controlador de velocidade do motor proposto aqui apresentado possui um controle de velocidade PWM ajustável e um controle de atraso ajustável para o motor associado, que precisa ser controlado.
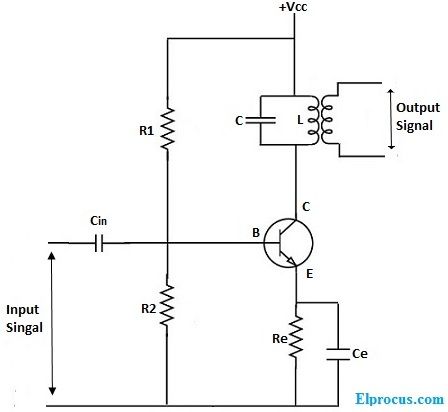
Como pode ser visto no diagrama acima, o circuito incorpora dois estágios discretos, um consistindo no versátil IC 4060 e o outro usando o cavalo de trabalho IC 555.
Basicamente, ambos são CIs de temporizador por natureza, no entanto, aqui o IC 555 é configurado como um controlador PWM cuja saída PWM é ajustável usando o potenciômetro de 5K associado.
Portanto, este estágio cuida do controle da velocidade do motor e pode ser definido para qualquer velocidade desejada ajustando manualmente o potenciômetro de 5K.
Agora, conforme solicitado, o motor precisa ser ligado apenas por um determinado período de tempo, e isso é implementado pelo estágio 4060 C. O tempo de atraso que precisa ser corrigido para permitir que o motor seja desligado, uma vez que este decorrer é ajustado pelo potenciômetro 1M associado ao pino # 10 do IC 4060 e indicado como P1, o capacitor 1uF também se torna diretamente responsável por determinar o tempo atraso pelo qual o motor pode permanecer LIGADO.
Quando a energia é LIGADA, o IC LIGA o motor e permite que ele opere em uma velocidade particular conforme especificado pelo ajuste do potenciômetro 5K.
Além disso, simultaneamente, o IC 4060 começa a contar e, assim que o intervalo de tempo especificado decorre, o trocadilho # 3 deste IC aumenta, disparando o transistor NPN BC547 para a condução.
O transistor aterra o pino # 4 do IC555, desabilitando completamente o IC 555 e o mosfet em seu pino # 3, de modo que o motor conectado imediatamente para.
O diodo conectado através dos pinos 3 e 11 do IC 4060 garante que a condição acima permaneça travada até que a energia seja desligada e ligada novamente para iniciar um novo ciclo.
Outra versão mais simples do circuito acima é mostrada abaixo. Ele usa um circuito OFF de atraso transistorizado em vez do IC 4060.

Anterior: Faça este Circuito de Temporizador de Aquecedor de Água Geyser com Desligamento Automático Próximo: Circuito de fonte de alimentação dupla ajustável de 3 V, 5 V, 6 V, 9 V, 12 V, 15 V