
Introdução aos Sistemas Embarcados
O sistema no qual o propósito dedicado do software é embutido em um projeto de hardware é conhecido como sistema embutido. Este sistema pode ser um sistema independente ou um sistema maior. O software geralmente é embutido em módulos de memória como ROM, e não precisa de nenhuma memória secundária como em um computador. Telecom, cartões inteligentes, mísseis, redes de computadores, eletrônicos de consumo digital e satélites são alguns dos aplicativos de sistemas embarcados.

Aplicativos de sistemas embarcados
Aplicativos de sistemas embarcados incluem robótica, câmera digital, brinquedos multitarefas, sistemas de cozinha e lavagem, sistemas biomédicos, controladores de teclado, telefones celulares e inteligentes, sistemas de computação, sistema eletrônico de exibição de peso inteligente e sistemas de entretenimento, como vídeos, jogos, sistema de música e videogames e assim por diante.
Processo de design de sistema embarcado pode ser feito por simulação primeiro, que é usada para testar o circuito porque a mudança de hardware se torna muito difícil se o circuito não funcionar corretamente. Se os resultados forem combinados com os desejados, o processo será projetado permanentemente por processos de wafer sequenciais.
Noções básicas de sistemas embarcados
Os sistemas incorporados são projetados para realizar tarefas específicas, mas não podem ser usados como computadores de propósito geral para realizar tarefas diferentes. O software para sistema embarcado é normalmente referido como firmware, que pode ser armazenado em um disco ou em um único chip. Os dois elementos principais dos sistemas são:
- Hardware de sistema integrado
- Software de sistema integrado

Hardware e software de sistema integrado
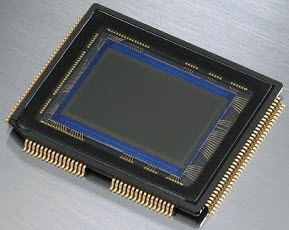
Hardware de sistema integrado : Um sistema embarcado requer uma plataforma de hardware para interagir com várias entradas e saídas ou variáveis em tempo real. O hardware inclui controlador como microcontrolador ou microprocessador , módulos de memória, interfaces de E / S, sistemas de exibição e módulos de comunicação, etc.
Software de sistema integrado : Este software permite a programação da maneira desejada de forma que controle várias operações. Ele é escrito em um formato de alto nível, compilado em código e, em seguida, despejado em controladores de hardware.
Sistemas embarcados em tempo real são sistemas de computador que executam as ações, como monitorar, responder e controlar o movimento externo. O ambiente externo é conectado ao sistema de computador por meio de sensores , atuadores e interfaces de E / S. Um sistema de computador real incorporado a um sistema de computador é conhecido como sistema incorporado de tempo real. Um sistema embarcado em tempo real é usado em diferentes campos, como militar, setores governamentais e médicos.
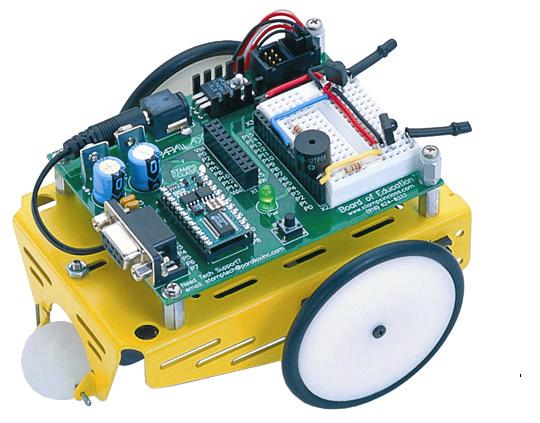
Projetos robóticos em tempo real em sistemas embarcados
Sistemas embarcados pode ser usado em muitas das aplicações em tempo real, como automóveis, robótica, indústrias, etc. projetos em tempo real estão relacionados à tecnologia robótica .
1. Veículo robótico controlado por voz com reconhecimento de fala de longa distância
O objetivo deste projeto é controlar um veículo robótico por comandos de voz para operação remota. A Microcontrolador 8051 é usado com um módulo de reconhecimento de voz para realizar a operação desejada. Ele usa um microcontrolador 8051, um módulo de reconhecimento de voz, um botão de pressão, um módulo RF, um codificador, um decodificador, um driver de motor IC, motores DC, baterias e outros componentes diversos.

Veículo robótico controlado por voz - transmissor
Os movimentos do veículo, como para a esquerda, para a direita, para cima e para baixo, podem ser executados usando botões ou comandos de voz por um módulo de reconhecimento de voz que faz interface com o microcontrolador. Aqui, um codificador é usado para codificar os comandos dados ao microcontrolador usando o transmissor RF para transmitir os sinais na frequência de 433 MHz.
Portanto, quando os sinais que surgem ao pressionar os botões, ou os sinais de comando de voz correspondentes ao movimento são recebidos pelo microcontrolador, ele envia sinais de controle para o circuito receptor através do módulo transmissor.

Veículo-receptor robótico controlado por voz
Ao receber esses sinais, um receptor de RF transfere esses sinais para um circuito decodificador em que os dados binários são convertidos em um sinal de nível de microcontrolador. Portanto, o microcontrolador executa o movimento desejado do circuito do transmissor. Módulo laser é interface com o microcontrolador para detectar as operações realizadas pelo robô mesmo em locais escuros.
2. Veículo robótico controlado remotamente baseado em tela de toque para gerenciamento de loja
Este projeto envolve o controle de um veículo robótico usando uma tela de toque unidade para operação remota. Um painel de tela de toque é colocado na extremidade do transmissor, e um robô pick-n-place é colocado na extremidade do receptor para realizar uma tarefa, respondendo aos sinais. Os componentes de hardware usados neste projeto incluem um microcontrolador 8051, um painel touch-screen, antenas (lado transmissor-receptor), um codificador, um decodificador, motores DC, um corpo robótico, uma bateria, etc.

Veículo robótico baseado em tela sensível ao toque - transmissor
Conforme discutido no módulo de reconhecimento de voz do projeto acima, neste projeto também um módulo de tela de toque envia os sinais de controle correspondentes ao movimento do veículo para o microcontrolador. O controlador subsequentemente envia esses sinais para o codificador e, em seguida, para o transmissor que, eventualmente, transmite os sinais para o circuito receptor.

Receptor de veículo robótico baseado em tela sensível ao toque
A antena colocada na extremidade receptora recebe os sinais de RF da antena transmissora e decodifica os dados, e então os envia para o microcontrolador. Este conjunto possui quatro motores em interface com o microcontrolador: dois motores para a movimentação do braço e da garra e os outros dois para a movimentação do corpo. Todos esses motores são acionados por um driver de motor IC que recebe continuamente os comandos do microcontrolador.
Estes são os dois aplicativos de sistemas embarcados no campo da robótica. Os exemplos em tempo real dos sistemas incorporados podem ter fornecido a você um melhor entendimento do conceito dos sistemas incorporados. Se você tiver mais dúvidas sobre a implementação desses projetos, entre em contato conosco comentando abaixo.
Créditos fotográficos
- Aplicativos de sistemas embarcados oocidades
- Hardware e software de sistema integrado dca-design






{kind=link}