Os robôs podem ser usados em muitas aplicações nas indústrias, militar, doméstica. Um dos principais usos dos robôs é uma vantagem para os seres humanos. Quer se trate de qualquer tipo de situação perigosa, como um incêndio ou um local cheio de minas terrestres, os robôs podem facilmente encontrar uma saída para esses problemas. Então, vamos ver esses dois tipos de robôs - um robô sensor de mina terrestre e um robô de combate a incêndio
Robô sensor de mina terrestre
Como detectar uma mina terrestre com robôs?
Uma das aplicações mais importantes da robótica é a defesa. Um robô militar é um veículo controlado remotamente com muitos recursos exclusivos. Pode ser um veículo robótico com uma câmera para espionar, um veículo robótico com uma arma LASER para detectar e destruir alvos ou um robô com um detector de metal para detectar a presença de minas terrestres.
Uma das formas tradicionais e convencionais de detecção de minas é o uso de pessoais treinados que procuram manualmente por metais ou minas usando um detector de metais. No entanto, isso é inseguro, caro e também lento.
Para superar este problema, é preferível um sistema muito mais avançado.
Algumas maneiras de detectar minas terrestres:
- Usando um robô que pode inserir uma sonda no solo, que pode detectar os objetos sob o solo e determinar o tipo de material.
- Usando um robô com um detector de metais que pode sentir a presença de elementos condutores como minas terrestres e alarmar o usuário.
Antes de entrar em detalhes sobre o segundo tipo - ou seja, o robô com um detector de metal, vamos relembrar brevemente os dois termos importantes - Minas Terrestres e Detector de Metal.
PARA Mina terrestre é um dispositivo explosivo colocado deliberadamente sob o solo que explode quando acionado por pressão. De acordo com um relatório estatístico, existem cerca de 100 milhões de minas terrestres em 70 países em todo o mundo. Uma vez instalada, uma mina pode funcionar por até 50 anos. Não é perigoso !!

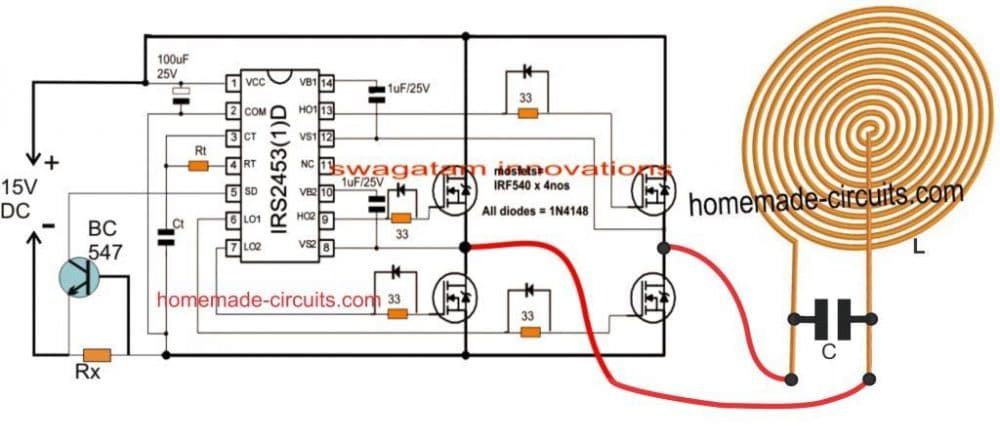
Um detector de metal básico funciona segundo o princípio da lei de indução de Faraday. Consiste em uma bobina que é energizada para desenvolver um campo magnético pulsante ao seu redor. Quando a bobina chega perto de um elemento condutor como o metal (uma mina), uma corrente elétrica (corrente parasita) é induzida nela. A corrente parasita induzida causa o desenvolvimento de um campo eletromagnético ao redor do metal, que é retransmitido para a bobina que desenvolve um sinal elétrico que é analisado. Maior é a distância entre a bobina e o metal, mais fraco é o campo magnético.
Um protótipo simples:

Um protótipo simples de veículo robótico com detector de metais
Projetando o Robô:
O veículo robótico consiste nas seguintes unidades:
- Uma base retangular para suportar toda a estrutura do robô, fixada com duas rodas para movimentação.
- Alguns motores CC para fornecer o movimento necessário ao robô.
- Uma unidade de controle que consiste em um receptor de RF que recebe sinais de comando de uma unidade transmissora para controlar o acionador do motor e controlar os motores de acordo.
- Um circuito detector de metal junto com um alarme sonoro é acionado assim que o metal é detectado.
Como funciona o robô:
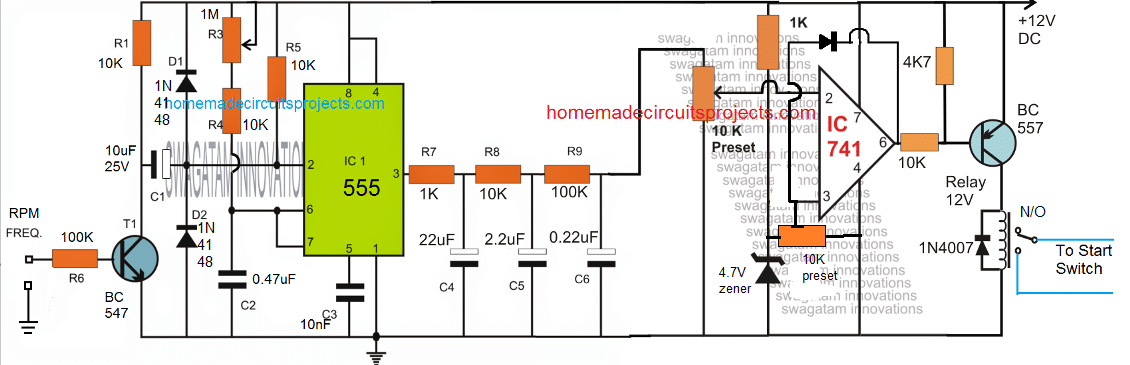
O circuito detector de metal embutido no circuito de controle do robô consiste em um transistor que é acionado por um circuito oscilador sintonizado que consiste na bobina. Quando um metal é detectado e a corrente elétrica é retransmitida através da bobina, o transistor1 está em condição e aciona outro transistor2 para a condição desligada. Este transistor3, por sua vez, leva outro transistor à condição desligada. Este transistor 3 em particular está conectado a outro transistor 4, que está conectado de forma que fique ligado quando o transistor 3 do driver estiver desligado. O transistor 4 é conectado de forma que, quando ligado, a campainha e o LED recebem polarização adequada e começam a conduzir.

Diagrama de blocos da unidade de detecção de metais
O LED começa a brilhar e a campainha começa a tocar. Assim, quando um metal é detectado, o alarme sonoro começará a tocar e o LED acenderá.
Controlando o Robô:
O protótipo simples pode ser controlado usando comunicação RF, que é um sistema de comunicação de curto alcance. Os comandos são transmitidos usando um transmissor e recebidos por um receptor embutido no circuito do robô para controlar o movimento do robô.

Diagrama de blocos da seção do transmissor
O transmissor consiste em um conjunto de botões como avançar, voltar, parar, esquerda e direita que são pressionados para fornecer movimento do robô em qualquer direção desejada. Os botões de pressão são conectados à porta de entrada do microcontrolador. O microcontrolador ao receber esses sinais desenvolve um sinal de 4 bits correspondente em forma paralela através de outra porta de E / S, à qual um codificador IC é conectado. O codificador converte esses sinais em uma forma serial de dados. O transmissor de RF modula esses dados seriais, que são transmitidos pela antena.

Diagrama de Bloco da Seção do Receptor
A seção receptora montada no robô consiste no receptor RF que demodula este sinal. O decodificador IC recebe este sinal na forma serial e desenvolve dados paralelos de 4 bits correspondentes em sua saída. O microcontrolador recebe esses dados e, consequentemente, fornece um sinal de controle para o driver do motor IC LM293D, que aciona os dois motores.
Veículo robótico de combate a incêndio:
O conceito de veículo robótico de combate a incêndio está lutando em um incêndio. Nos últimos anos, ocorreram vários acidentes graves, incluindo incêndios e explosões de bombas. Temos sabido sobre grandes acidentes de incêndio, como usinas nucleares, petróleo, tanques de gás e fábricas de produtos químicos, empresas industriais de incêndio em grande escala nestes lugares, uma vez que começaram o incêndio, pode resultar é muito grave. Milhares de pessoas morreram nesta incidência. Isso é um combate a incêndio veículo robótico tecnologia. Este veículo robótico costumava encontrar o fogo e lutar pelos incêndios.

Veículo robótico de combate a incêndio
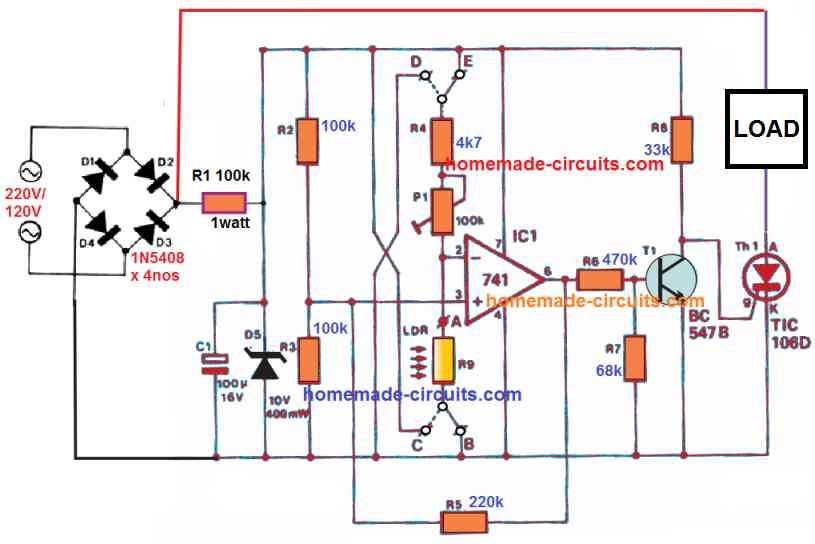
Princípio de funcionamento do veículo robótico de combate a incêndio:
O veículo robô carregado com um caminhão-tanque. A bomba é controlada por comunicação sem fio (comunicação RF e móvel). A extremidade do transmissor conectada aos botões. Usando este botão, os comandos são enviados para o receptor e controlam o momento do robô para frente, para trás, esquerda, direita. Os três motores da extremidade receptora são conectados ao microcontrolador.

Diagrama de blocos do transmissor

Diagrama de bloco receptor
O transmissor RF atua como controle remoto RF onde o alcance é de 200 metros. Em residências, escritórios e indústrias, os sensores de incêndio são mantidos em determinados locais quando ocorre um incêndio próximo a um sensor de incêndio. Os sensores são uma sensação de que o bit correspondente é transmitido ao receptor RF. O receptor RF é integrado a um microcontrolador. Quando o receptor RF recebe os sinais de que as informações estão passando para o microcontrolador, o robô se move em direção aos sensores de incêndio. Os locais dos sensores são armazenados no microcontrolador. Assim que o robô atinge o local desejado, o robô para e ativa o pulverizador para esse fogo. Após o disparo, o robô vai para a posição inicial. Todo o circuito é controlado pelo microcontrolador.
Tipos de veículos robóticos de combate a incêndio:
Veículo robótico de combate a incêndio residencial :
A ação de campo é restrita ao Flore atual da casa. Este robô usa muitos utensílios domésticos para pegar fogo quando alguém está dormindo ou ausente. Este robô é usado para proteger a casa e usando este aplicativo todas as portas são abertas em Flore porque este veículo está se movendo de um lugar para outro na casa. A área de combate a incêndio deve ser segura para não causar um novo acidente. O recurso adicional deste robô é operar a longa distância.
Combate a incêndio industrial:
A maioria das indústrias enfrentam problemas de acidentes de incêndio como gás, petróleo, usinas nucleares, indústrias químicas, grande quantidade de danos e mais pessoas estão mortas perto das áreas vizinhas. Este robô tem força para carregar fogo dentro da área de queima para fornecer água ilimitada. O fogo causa visibilidade reduzida, calor extremo e muitas outras situações que podem causar ferimentos.
Combate a incêndios florestais:
Os incêndios florestais são muito perigosos. A queima de uma grande área florestal pode demorar um pouco. Até mesmo os bombeiros da cidade precisam lidar com os incêndios florestais na área ao redor da cidade. Alguns anos atrás, cerca de 152 bombeiros foram mortos na década de 1990. A robótica de incêndio florestal está usando para pegar o fogo e lutar contra o fogo. Este robô usa um dispositivo de controle externo para fins de comunicação sem fio. O módulo é conectado com a extremidade de saída que é usada para a extinção de incêndio florestal do robô. Os aplicativos como sensor de pressão, sensor de temperatura, sensor de smog, sensor infravermelho, são usados para controlar o robô de combate a incêndios florestais.
No prompt!
Embora eu tenha dado uma ideia básica do robô com um detector de metais, uma questão importante ainda existe - Como guiar o robô em terrenos irregulares que são desconhecidos, especialmente em ambientes sujeitos a chuvas fortes, poeira e altas temperaturas. Para encontrar uma resposta e postar seus comentários.