No mundo moderno, o robô terá um papel importante . O objetivo principal do robô é diminuir a mão de obra. Os robôs são usados em eletrônica em muitas aplicações. Neste artigo, discutimos sobre como construir um robô com o módulo Arduino e o microcontrolador 8051. Para construir um robô com o Arduino, estamos explicando sobre o robô arduino com a prevenção de obstáculos. Os componentes necessários incluem corpo do robô, motor DC, sensor ultrassônico, módulo Arduino, IC do driver do motor e módulo Arduino
Como construir um robô?
O componentes necessários para construir o robô inclui o seguinte
Corpo de Robô
O corpo do robô básico de o robô de evitar obstáculos é mostrado na imagem a seguir. O corpo do robô é um corpo de plástico e contém rodas em ambos os lados. Na frente do corpo do robô, o sensor ultrassônico está disposto. Ao usar o sensor ultrassônico, o obstáculo pode detectar. Quando o robô está se movendo, se algum obstáculo for detectado pelo sensor ultrassônico, o robô se moverá para o lado e continuará se movendo.

Corpo de Robô
Motor DC
O O motor DC é um motor elétrico e funciona com eletricidade de corrente contínua. O funcionamento de qualquer motor elétrico é baseado no eletromagnetismo. O campo magnético é produzido pelo condutor de corrente quando ele é colocado em um campo magnético externo, ele experimentará uma força proporcional à corrente no condutor. Geralmente, sabemos que os ímãs são atração de polaridade oposta de norte a sul e se as polaridades são as mesmas de norte a norte e de sul a sul, então os ímãs se repelirão.

Motor DC
A configuração interna do motor DC é projetada para conectar a interação magnética entre o condutor de corrente e o campo magnético externo para produzir o movimento. Neste, estamos usando dois motores DC, cada motor contém 6v e o total de dois motores DC contém 12v. Os dois motores DC são colocados no corpo do robô, o que podemos observar na imagem a seguir. O corpo do robô é movido com a ajuda dos motores DC

Corpo do robô com motor DC
Módulo Arduino
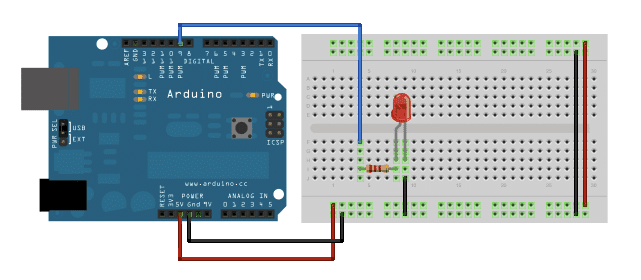
A imagem a seguir mostra a imagem do módulo arduino. O módulo arduino desempenha um papel importante no projeto do robô para evitar obstáculos usando o kit arduino. O pino do receptor do arduino é conectado ao segundo pino do sensor ultrassônico e o primeiro, segundo e terceiro pino do módulo arduino é conectado ao driver do motor DC. Os componentes comuns, capacitor e diodo, também são conectados ao módulo arduino com a ajuda da fonte de alimentação da bateria.

Módulo Arduino
Motor Driver IC
Para operar o motor DC o motorista do motor IC usava. Os pinos 3,6 e 11, 14 do driver do motor são conectados ao motor DC. Os pinos de entrada 1 e 2 são conectados ao módulo arduino e o pino de ativação é conectado ao pino transmissor do arduino. Os pinos 4, 5, 12, 13 do driver do motor são conectados ao solo.

Motor Driver IC
Sensor ultrasônico
Neste conceito o sensor ultrassônico é usado para detectar um obstáculo à frente e enviará o comando para a placa arduino. Dependendo do sinal de entrada, o microcontrolador redireciona o robô para se mover em direções alternativas.

Sensor ultrasônico
As aplicações do robô arduino para evitar obstáculos
- O robô Arduino pode se mover em qualquer superfície
- Ele pode se mover em superfícies metálicas como o corpo de uma geladeira.
A imagem abaixo mostra o robô arduino para evitar obstáculos

Robô Arduino para evitar obstáculos
Para construir um robô com o microcontrolador 8051 estamos explicando sobre o veículo robô detector de metais. Os componentes necessários para construir o robô com o microcontrolador 8051 são
- Microcontrolador 8051
- Motores DC
- Motoristas
- Detector de metal
- Decodificador
- Codificador
- Apertar botões
- Cristal
- Transmissor e receptor RF
Detector de metal
O detector de metal é uma bobina que possui uma ou mais bobinas de metal usadas para detectar os metais no solo. O detector de metais funciona segundo o princípio da indução eletromagnética. O detector de metais está conectado ao corpo do robô através da placa de circuito impresso que podemos observar na última imagem. A imagem a seguir mostra o detector de metais geral usado nos projetos eletrônicos.

Detector de metal
Apertar botões
Os botões são botões feitos de metais duros, como plástico e metal. Geralmente, os botões são usados para redefinir o programa no microcontrolador. A imagem a seguir mostra a imagem do botão.

Botão de apertar
Microcontrolador 8051
O O microcontrolador 8051 consiste em 40 pinos . O 4º e 5º pinos do microcontrolador são conectados ao oscilador de cristal. O pino Vcc é fornecido à fonte de alimentação de 5 V e o pino terra é conectado ao terra. Os pinos 15, 16, 18, 19 do microcontrolador são conectados ao codificador IC do HT12E. Os pinos 2, 7, 8, 9 do microcontrolador são conectados aos botões.
A imagem a seguir depois de conectar todos os componentes como resistor, capacitor, oscilador de cristal, microcontrolador série 8051, codificadores e etc estão ligados a placa de circuito impresso .

Conexões PCB
A imagem abaixo mostra o robô detector de metais com o microcontrolador da série 8051.

Robô detector de metais com o microcontrolador série 8051
Neste artigo, discutimos sobre o Como construir um robô com o arduino e o microcontrolador 8051 . Espero que ao ler este artigo você tenha adquirido algum conhecimento básico para construir um robô. Se você tiver alguma dúvida sobre este artigo ou sobre os eletrônicos e projetos de comunicação , sinta-se à vontade para comentar na seção abaixo. Aqui está a pergunta para você, O que é um microcontrolador da série 8051?
.