A postagem explica como fazer um carrinho de controle remoto barato, mas poderoso, que pode ser manobrado para a esquerda, direita, para frente e para trás conforme necessário, pelo usuário usando o aparelho remoto fornecido. A ideia não depende de um circuito microcontrolador.
Em um de meus posts anteriores, discuti sobre um circuito simples de brinquedo com controle remoto , a ideia atual de um carrinho com controle remoto é inspirada no mesmo conceito, mas destina-se a ser usado para transportar cargas formidáveis e muito mais pesadas.
Carrinho de controle remoto para pontos de venda
Este projeto pode ser especificamente adequado e aplicável para shoppings ou lojas de varejo, onde pode ser implementado como um pequeno veículo de transporte para transportar material dentro do complexo ou nas instalações com a ajuda de algumas prensas da unidade Tx remota.
A primeira etapa na construção do carrinho de controle remoto proposto seria adquirir um conjunto de módulos Rx / Tx RF padrão de seu revendedor eletrônico local ou de qualquer loja online. Recomendo comprar em uma loja online, pois seria muito mais fácil e conveniente , embora mais caro.
As unidades adquiridas teriam a seguinte aparência:
Usando os módulos Tx, Rx de 433 MHz

A unidade de cor marrom do lado esquerdo é o Tx ou a unidade transmissora, enquanto o amplo circuito adjacente é o Rx ou a unidade receptora.
A unidade Tx pode ser vista com 4 botões de cor vermelha marcados como A, B, C, D, e a placa Rx pode ser vista com 4 relés (caixas de cor preta).
Os quatro botões respectivos do módulo Tx são acoplados sem fio para operar os quatro relés correspondentes do módulo Rx.
Você pode ver os conectores fixados nas bordas da placa (cor verde), esses conectores são devidamente terminados com as entradas de alimentação (+) (-) para a placa Rx e também com os contatos de relé, para todos os 4 relés.
Um relé, como todos sabemos, consiste em 5 contatos básicos e suas pinagens, a saber: 2 pinos para a bobina, um para o pólo e um para cada N / C e N / O.
Visto que existem 4 relés na unidade Rx, você será capaz de encontrar 5 x 4 = 20 saídas associadas aos pontos de conector relevantes.
Pode ser uma tarefa tediosa rastrear separadamente essas terminações de relé nos conectores, então eu recomendo soldar os fios diretamente nas pinagens do relé para evitar a tarefa acima. Este esforço será necessário mais tarde, enquanto conectamos a unidade com o circuito de controle do carrinho.
Construindo o circuito de controle de relé para o carrinho
Para isso, você precisará de um punhado de relés e diodos. Os relés devem ser classificados corretamente para lidar com os motores das rodas de alta potência do trole. Eu recomendo usar OEN make relés para isso, conforme mostrado na imagem a seguir:

Os diodos que serão necessários no circuito acionador do relé podem ser nossos diodos 1N4007 padrão.
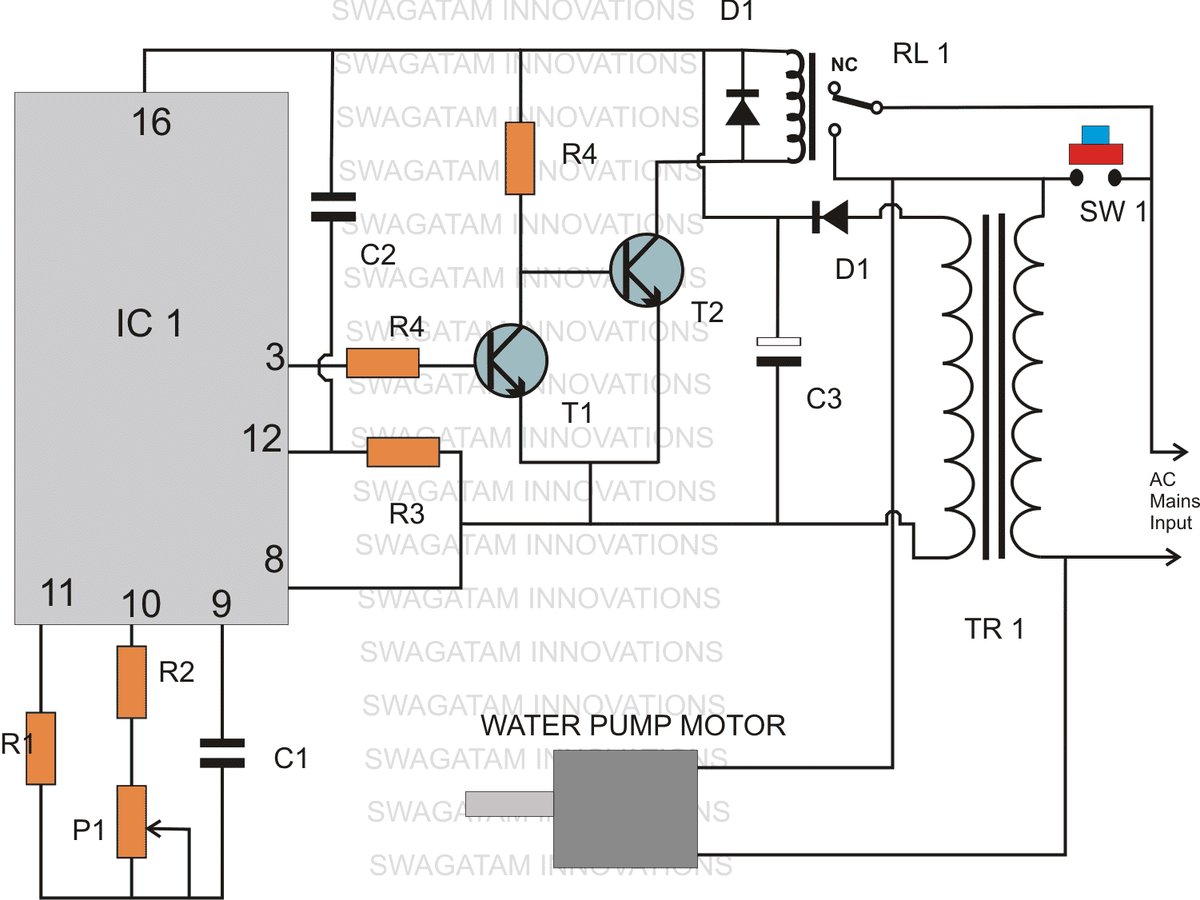
Os detalhes do circuito para o mesmo podem ser testemunhados no diagrama a seguir:
Detalhes e esquema da fiação do relé


Como funciona o circuito do trole remoto
Usando os relés especificados acima e os diodos, você precisará terminar de construir a placa de circuito do driver do relé acima, o que pode ser feito simplesmente em um pedaço de veroboard.
Depois disso, temos uma tarefa importante à nossa disposição que é integrar os fios verdes mostrados no diagrama acima com a placa Rx do controle remoto.
Antes da integração teremos que inserir alguns mods no módulo Rx, conforme explicado a seguir:
Utilizando pedaços de fios isolados, devidamente despojados e estanhados nas pontas, vá conectando (por soldagem) todos os pinos polares do relé e ligue esta junta comum com a linha positiva da placa Rx.
Agora, nesta situação, podemos assumir que quando os relés não estão em um estado ativado (através do aparelho remoto) a entrada positiva do pólo de cada relé será ligada aos seus respectivos pontos N / C, e quando ativados, o pólo positivo será mude e conecte-se com os pontos N / O relevantes.
Em suma, na ativação o contato N / O receberá a alimentação positiva e, portanto, estamos interessados nesta alimentação positiva dos contatos N / O porque estes serão iniciados apenas quando os relés forem acionados, o que implica que quando o Tx (transmissor ) botões são pressionados.
Portanto, todas as pinagens N / O relevantes devem ser unidas aos fios verdes do circuito acionador do relé indicado acima.
Feito isso, o Rx será integrado ao módulo driver do relé para a execução de todas as manobras pretendidas do carrinho com controle remoto, ou seja: frente, ré, movimentos e giros à esquerda, à direita.
Alimentação da placa de acionamento do relé
Uma vez que os relés no estágio de acionamento do relé seriam responsáveis por mover os motores pesados conectados à roda do trole, o fornecimento para isso precisaria ser equivalentemente forte, portanto, baterias de chumbo-ácido de ciclo profundo tornam-se ideais para esta aplicação.
Supondo que os motores sejam classificados para 12 V, uma bateria de chumbo-ácido 40AH seria boa o suficiente para permitir que o carrinho se movesse mesmo com cargas mais pesadas.
Configurando as rodas com os motores para as manobras pretendidas
Como pode ser identificado na figura a seguir, o carrinho de controle remoto discutido exigirá 4 rodas para apoiar e rolar o sistema.
No entanto, apenas as duas rodas dianteiras seriam responsáveis por permitir as manobras pretendidas de ré, para frente, direita e esquerda e, portanto, os motores seriam obrigados a ser fixados com essas duas rodas dianteiras do trole, conforme mostrado na imagem a seguir:

Configurando as conexões da roda do carrinho
As rodas traseiras são apenas rodas fictícias, fixadas apenas para permitir um rolamento livre do carrinho, em resposta aos comandos das rodas dianteiras.
Como pode ser observado na imagem acima, o módulo marcado como conjunto de PCB é a placa do driver de relé, o módulo remoto significa a placa do receptor remoto Rx enquanto a bateria é a bateria de 40 AH 12V que discutimos na seção anterior do artigo.
Após a montagem, pode ser necessário ajustar e verificar as conexões dos fios do motor com a placa acionadora do relé.
Para um movimento para frente e para trás ambos os motores devem estar em sincronia um com o outro, por outro lado, para executar um flip para a direita ou para a esquerda, os motores devem passar por um movimento de rotação oposto.
Se você descobrir que o motor não está se comportando da maneira acima, é mais provável que seja corrigido simplesmente trocando a polaridade de um dos motores. Isso corrigirá imediatamente a situação e forçará os motores a implementar as manobras especificadas.
Finalmente, os botões A.B, C, D podem ser adequadamente combinados ou trocados para qualquer uma das respectivas manobras ajustando os links do fio verde com o módulo Rx, de acordo com a preferência pessoal do usuário.
Anterior: Como modificar SMPS para saída de tensão e corrente ajustável Próximo: Sensor de Microondas ou Circuito de Sensor Doppler