Uma introdução aos robôs
Robô é uma máquina que se parece com seres humanos. Isso foi programado para fazer alguma coisa. A palavra Robô vem da palavra eslava robota (que significa trabalhador forçado). O robô foi desenvolvido em 1960.Robôs são feitos de metais e misturadores de outros elementos. Os robôs apenas comandam e o que os humanos dizem. Trinta anos atrás, os robôs eram algo em um filme de ficção científica. Mas hoje a robótica é usada em muitas áreas. E é muito importante para o futuro da humanidade. O tecnologias robóticas são aprimorados para ajudar a defesa nacional, saúde, manufatura, segurança interna, educação, bens de consumo e muitos setores diferentes. Os médicos já estão usando a robótica em cirurgias especiais. Os robôs são importantes porque executam tarefas perigosas e impossíveis de serem realizadas por humanos.
5 razões pelas quais os robôs são populares
- Velocidade
- Ambientes perigosos
- Tarefas repetitivas
- Eficiência
- Precisão
Velocidade:
Os robôs podem ser usados porque são mais rápidos do que as pessoas na execução de tarefas. O robô é, na verdade, um mecanismo controlado por um computador. Sabemos que os computadores podem fazer cálculos e processar dados muito rapidamente em comparação com os seres humanos. Alguns robôs realmente se movem mais rapidamente e realizam uma tarefa, como pegar e inserir itens, mais rápido do que humanos.
Ambientes perigosos:
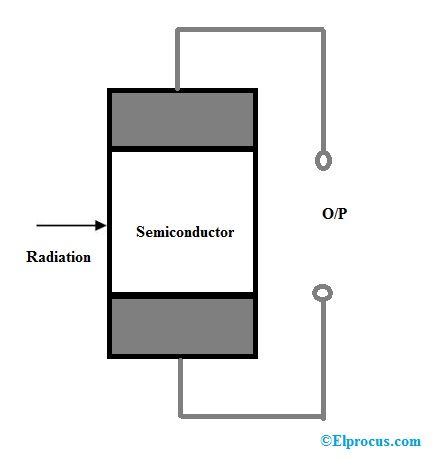
Os robôs podem ser usados em ambientes perigosos porque podem trabalhar em locais onde um ser humano estaria em perigo. Por exemplo, o robô pode ser projetado para suportar uma maior quantidade de calor, radiação e vapores químicos do que os humanos.
Tarefas repetitivas:
Algumas vezes, os robôs não são realmente muito mais rápidos do que os humanos, mas são bons em simplesmente fazer o mesmo trabalho indefinidamente. Isso é fácil para o robô, porque uma vez que o robô foi programado para fazer um trabalho uma vez, o mesmo programa pode ser executado muitas vezes para realizar o trabalho muitas vezes. E o robô não ficará entediado como um humano.
Eficiência:
Eficiência significa realizar tarefas sem desperdício. Isto significa
- Sem perder tempo
- Não desperdiçando materiais
- Não desperdiçando energia
Precisão:
Precisão significa realizar tarefas com muita precisão. Em uma fábrica de itens de fabricação, cada item deve ser feito de forma idêntica. Quando os itens estão sendo montados, um robô pode posicionar as peças em uma fração de milímetro.
Controlando um Robô
Um robô básico ou sistema robótico consiste em um corpo rígido que abriga todo o circuito do robô. O circuito consiste em sensores que detectam quaisquer mudanças no ambiente e fornecem essas informações para a unidade de controle.
Com base na entrada dos sensores, a unidade de controle controla os atuadores em conformidade. Assim, a principal operação do robô está na unidade de controle. Em algumas aplicações, o robô é completamente automático, ou seja, o controle está dentro do próprio dispositivo e com base em alguma unidade de sensor, os atuadores são controlados automaticamente pela unidade de controle. Em alguns aplicativos, o robô é controlado manualmente.
Vamos ver duas maneiras de controlar um robô manualmente
- Usando um telefone celular
- Usando um controle remoto de TV
Veículo robótico controlado por telefone celular:
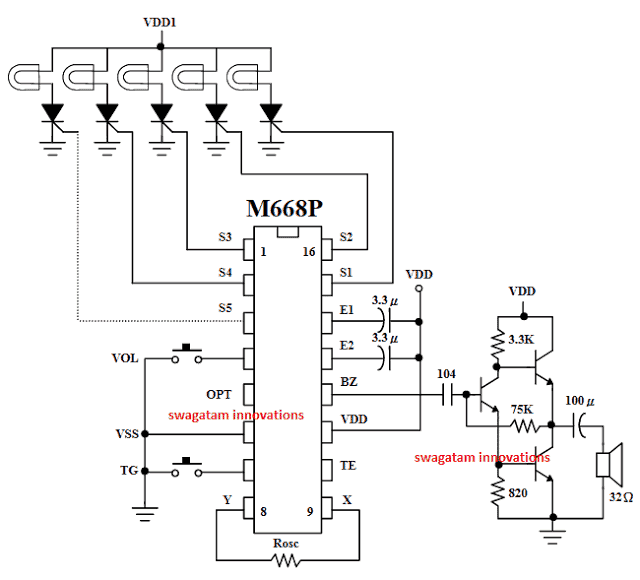
Quando falamos sobre veículos robô sem fio , geralmente pensamos em circuitos de tecnologia RF. Mas esse projeto é muito diferente. Ele usa um telefone celular para controlar o movimento do veículo robótico. Aqui, usamos a tecnologia DTMF para controlar o veículo robótico usando o telefone celular. Utilizamos dois celulares, um conectado ao robô e outro ao usuário. A comunicação é estabelecida entre esses dois celulares e, se qualquer tecla for pressionada, esse tom será ouvido na outra extremidade da célula. Este tom é denominado tom de “multifrequência de tom duplo” (DTMF).

Veículo robótico controlado por telefone celular

Diagrama de circuito de veículo robótico controlado por telefone celular
Este projeto visa desenvolver um veículo robótico que é controlado pelo telefone celular. Isso é baseado no microcontrolador 8051. Os dois telefones celulares controlam o robô de acordo com a exigência. Um celular é conectado ao robô e outro é o celular do usuário. Quando uma tecla pressionada no celular do usuário, essa tecla gera o tom correspondente, é recebida em outro celular. O tom recebido é processado pelo microcontrolador com ajuda do decodificador DTMF. O decodificador decodifica o tom DTMF em dígitos binários e esses dados binários codificados são enviados ao microcontrolador. Com base na entrada do telefone celular, o microcontrolador fornece sinais adequados ao acionador do motor para girar cada motor na direção desejada. Por exemplo, ao pressionar um determinado número no celular do usuário, a chamada é automaticamente discada para o celular do sistema. O sistema móvel é conectado ao decodificador DTMF que, consequentemente, decodifica o tom e o motor é girado na direção correspondente ao número pressionado.
Veículo robótico controlado por IR:
Neste sistema, principalmente um veículo robótico é controlado pelo controle remoto da TV. O sensor infravermelho (IR) faz interface com a unidade de controle do robô para detectar o sinal remoto. Essas informações são repassadas para a unidade de controle que movimenta o robô conforme a necessidade. Um microcontrolador é utilizado como sistema de controle.
Neste remoto IR funciona como um transmissor. No ponto em que o botão é pressionado no controle remoto, o sinal será aprovado e obtido pelo receptor IR. Este sinal é enviado para o microcontrolador que decodifica o sinal e realiza o movimento relacionado conforme o botão pressionado no controle remoto. Por exemplo, se o número 1 for pressionado no controle remoto, o robô será girado para a esquerda de acordo com nossa exigência. Os demais testes de empreendimentos (para frente, para trás e à direita) serão realizados de forma comparativa utilizando IR. Na extremidade receptora, o desenvolvimento é realizado por dois motores que fazem interface com o microcontrolador.
O programa é escrito, isto é, enquanto é executado, ele envia comandos para o controlador de motor IC de acordo com seu requisito para o funcionamento do motor para o movimento do robô, conforme explicado acima.

Diagrama de bloco de veículo robótico controlado por infravermelho
Se tiver alguma dúvida em relação a este artigo, deixe um comentário. E me diga mais aplicações e métodos relacionados a isso?