UMA servo-motor age como um atuador rotativo que é usado principalmente para transformar a entrada elétrica em aceleração mecânica. Este motor funciona com base no servomecanismo sempre que o feedback de posição é utilizado para controlar a velocidade e a localização final do motor. Os servomotores giram e obtêm um determinado ângulo com base na entrada aplicada. Os servomotores são pequenos em tamanho, mas são muito eficientes em termos energéticos. Esses motores são classificados em dois tipos, como servomotor CA e servomotor CC, mas a principal diferença entre esses dois motores é a fonte de energia usada. O desempenho de um servomotor CC depende principalmente apenas da tensão, enquanto um servo motor CA depende da tensão e da frequência. Este artigo discute um dos tipos de servomotores - um servo motor CA – trabalhando com aplicativos.
O que é servomotor CA?
Um tipo de servomotor que gera saída mecânica usando entrada elétrica CA na forma de velocidade angular precisa é chamado de servomotor CA. A potência de saída obtida deste servomotor varia principalmente de watts a alguns 100 watts. A frequência de operação do servo motor CA varia de 50 a 400 Hz. O diagrama do servo motor CA é mostrado abaixo.

As principais características dos servomotores CA incluem principalmente; estes são dispositivos com menos peso, proporcionando estabilidade e confiabilidade na operação, ruído não é gerado durante a operação, fornecendo características lineares de torque-velocidade e custos de manutenção reduzidos quando anéis coletores e escovas não estão presentes.
Por favor, consulte este link para saber mais sobre Tipos de Servo Motor CA
Construção de Servo Motor AC
Geralmente, um servo motor CA é um motor de indução bifásico. Este motor é construído usando um estator e um rotor como um motor de indução normal. Geralmente, o estator deste servo motor possui uma estrutura laminada. Este estator inclui dois enrolamentos que são colocados a 90 graus de distância no espaço. Devido a essa variação de fase, um campo magnético rotativo é gerado.

O primeiro enrolamento é conhecido como enrolamento principal ou também conhecido como fase fixa ou enrolamento de referência. Aqui, o enrolamento principal é ativado a partir da fonte de alimentação de tensão constante, enquanto o outro enrolamento, como o enrolamento de controle ou a fase de controle, é ativado pela tensão de controle variável. Esta tensão de controle é simplesmente fornecida a partir de um servo amplificador.

Geralmente, o rotor está disponível em dois tipos tipo gaiola de esquilo e tipo copo de arrasto. O rotor usado neste motor é um rotor tipo gaiola normal, incluindo barras de alumínio fixadas em ranhuras e curto-circuitadas através de anéis terminais. A folga de ar é mantida mínima para ligação de fluxo máximo. O outro tipo de rotor, como um copo de arrasto, é usado principalmente onde a inércia do sistema rotativo fica baixa. Portanto, isso ajuda a diminuir o consumo de energia.
Princípio de funcionamento do servomotor CA
O princípio de funcionamento do servo motor ac é; Em primeiro lugar, uma tensão CA constante é fornecida no enrolamento principal do motor de partida do servomotor e outro terminal do estator é conectado simplesmente ao transformador de controle em todo o enrolamento de controle. Por causa da tensão de referência aplicada, o eixo do gerador síncrono girará a uma velocidade específica e obterá uma certa posição angular.

Além disso, o eixo do transformador de controle possui uma posição angular específica que é comparada ao ponto angular do eixo do gerador síncrono. Portanto, a comparação das duas posições angulares fornecerá o sinal de erro. Mais particularmente, são avaliados os níveis de tensão para as posições de eixo equivalentes que produzem o sinal de erro. Portanto, esse sinal de erro se comunica com o nível de tensão atual no transformador de controle. Depois disso, esse sinal é dado ao servo amplificador para que ele gere uma tensão de controle desigual.
Por esta tensão aplicada, novamente o rotor atinge uma velocidade específica, inicia a rotação e mantém até que o valor do sinal de erro chegue a zero, atingindo assim a posição preferencial do motor dentro dos servomotores CA.
Função de transferência do servo motor AC
A função de transferência do servomotor CA pode ser definida como a razão entre L.T (Laplace Transform) da variável de saída para L.T (Laplace Transform) da variável de entrada. Portanto, é o modelo matemático que expressa a equação diferencial que informa o/p para i/p do sistema.
Se o T.F. (função de transferência) de qualquer sistema é conhecido, então a resposta de saída pode ser calculada para diferentes tipos de entradas para reconhecer a natureza do sistema. Da mesma forma, se a função de transferência (T.F) não for conhecida, ela pode ser encontrada experimentalmente simplesmente aplicando entradas conhecidas ao dispositivo e estudando a saída do sistema.
O servo motor CA é um motor de indução bifásico, o que significa que possui dois enrolamentos, como enrolamento de controle (enrolamento de campo principal) e enrolamento de referência (enrolamento estimulante).

Portanto, precisamos descobrir a função de transferência do servo motor CA, ou seja, θ(s)/ec(s). Aqui ‘θ(s)/’ é a saída do sistema, enquanto ex(s) é a entrada do sistema.
Para descobrir a função de transferência do motor, precisamos descobrir qual é o torque desenvolvido pelo motor 'Tm' e o torque desenvolvido pela carga 'Tl'. Se igualarmos a condição de equilíbrio como
Tm = Tl, então podemos obter a função de transferência.
Let, Tm = torque desenvolvido pelo motor.
Tl = torque desenvolvido pela carga ou torque de carga.
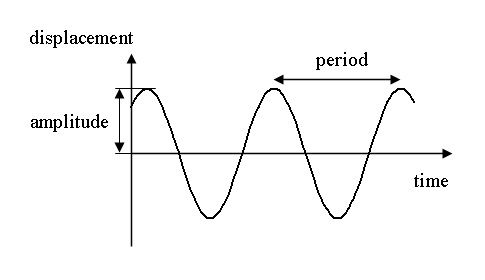
'θ' = deslocamento angular.
'ω' = d θ/dt = velocidade angular.
‘J’ = momento de inércia da carga.
‘B’ é o amortecedor da carga.
Aqui, as duas constantes a serem consideradas são K1 e K2.
'K1' é a inclinação da tensão da fase de controle em relação às características de torque.
'K2' é a inclinação das características de torque de velocidade.
Aqui, o torque desenvolvido pelo motor é simplesmente denotado por
Tm = K1ec- K2 dθ/dt —–(1)
O torque de carga (TL) pode ser modelado considerando a equação de balanceamento de torque.
Torque aplicado = torque oposto devido a J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
Sabemos que a condição de equilíbrio Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Aplique a equação da transformada de Laplace à equação acima
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/ S [B + JS + K2]
= K1/ S [B + K2 + JS]
= K1/ S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
Onde, Km = K1/ B + K2 = constante de ganho do motor.
Tm = J/ B + K2 = constante de tempo do motor.
Métodos de Controle de Velocidade do Servo Motor CA
Geralmente, servo motores tem três métodos de controle como controle de posição, controle de torque e controle de velocidade.
O método de controle de posição é usado para determinar o tamanho da velocidade de rotação em sinais de frequência de entrada externa. O ângulo de revolução é determinado pelo n. de pulsos. A posição e a velocidade de um servo motor podem ser atribuídas diretamente por meio de comunicação. Como a posição do método pode ter um controle extremamente rígido sobre a posição e a velocidade, ele é normalmente usado na aplicação de posicionamento.
No método de controle de torque, o torque de saída do servo motor é definido pela entrada analógica no endereço. Ele pode alterar o torque simplesmente alterando o analógico em tempo real. Além disso, também pode alterar o valor no endereço relativo por meio de comunicação.
No modo de controle de velocidade, a velocidade do motor pode ser controlada por entrada analógica e pulso. Se houver requisitos de precisão e nenhuma preocupação com tanto torque, o modo de velocidade é melhor.
Características do Servo Motor CA
As características de velocidade de torque de um servo motor CA são mostradas abaixo. Nas características a seguir, o torque está mudando com a velocidade, mas não linearmente porque depende principalmente da razão da reatância (X) para resistência (R). O baixo valor desta relação envolve que o motor tem alta resistência e baixa reatância, em tais casos, as características do motor são mais lineares do que o alto valor da relação de reatância (X) para resistência (R).

Vantagens
As vantagens dos servomotores CA incluem o seguinte.
- As características de controle de velocidade deste motor são boas.
- Eles geram menos quantidade de calor.
- Eles oferecem alta eficiência, mais torque por peso, confiabilidade e ruído de RF reduzido.
- Necessitam de menos manutenção.
- Eles têm uma expectativa de vida mais longa na inexistência de um comutador.
- Esses motores são capazes de lidar com surtos de corrente mais altos em máquinas industriais.
- Em altas velocidades, eles oferecem torque mais constante.
- Estes são altamente confiáveis.
- Eles fornecem desempenho de alta velocidade.
- Estes são adequados para aplicações de carga instável.
As desvantagens dos servomotores CA incluem o seguinte.
- O controle do servomotor CA é mais difícil.
- Esses motores podem ser quebrados por sobrecarga constante.
- As caixas de engrenagens são freqüentemente necessárias para transmitir energia em altas velocidades.
Formulários
As aplicações dos servomotores CA incluem o seguinte.
- Os servomotores CA são aplicáveis onde a regulação de posição é significativa e geralmente encontrada em dispositivos semicondutores, robôs, aeronaves e máquinas-ferramentas.
- Esses motores são usados nos instrumentos que operam em servomecanismo como em computadores e dispositivos de controle de posição.
- O servo motor AC é usado em máquinas-ferramentas, máquinas robóticas e sistemas de rastreamento.
- Esses servomotores são usados em uma variedade de indústrias devido à sua eficiência e versatilidade.
- O servo motor AC é usado na maioria das máquinas e aparelhos comuns como aquecedores de água, fornos, bombas, veículos off-road, equipamentos em jardins, etc.
- Muitos dos aparelhos e ferramentas que são usados todos os dias em casa são acionados por servomotores CA.
Assim, esta é uma visão geral do ac servo motores – funcionando com aplicações. Esses motores são usados em muitas aplicações, como instrumentos que operam em servomecanismos e também em máquinas-ferramentas, sistemas de rastreamento e robótica. Aqui está uma pergunta para você, o que é um motor de indução?