O proposto inversor de onda senoidal O circuito UPS é construído usando o microcontrolador PIC16F72, alguns componentes eletrônicos passivos e dispositivos de energia associados.
Dados fornecidos por: Sr. hisham bahaa-aldeen
Principais características:
As principais características técnicas do inversor sinusoidal PIC16F72 discutido podem ser avaliadas a partir dos seguintes dados:
A saída de energia (625 / 800va) pode ser totalmente customizada e pode ser atualizada para outros níveis desejados.
Bateria 12V / 200AH
Volt de saída do inversor: 230v (+ 2%)
Frequência de saída do inversor: 50 Hz
Forma de onda de saída do inversor: PWM Modulado Sinewave
Distorção Harmônica: menos de 3%
Fator de crista: menor que 4: 1
Eficiência do inversor: 90% para sistema 24v, cerca de 85% com sistema 12v
Ruído audível: menos 60db a 1 metro
Recursos de proteção do inversor
Desligamento de bateria fraca
Desligamento de sobrecarga
Desligamento por curto-circuito de saída
Detecção de bateria fraca e recurso de desligamento
Beep Start iniciado em 10,5 V (bipe a cada 3 segundos)
Desligamento do inversor em cerca de 10v (5 pulsos de bipe a cada 2 segundos)
Sobrecarga: bipe iniciado em 120% da carga (bipe na taxa de 2 segundos)
Desligamento do inversor com sobrecarga de 130% (5 pulsos de bipe a cada 2 segundos)
Os indicadores LED são fornecidos para o seguinte:
Inversor Ligado
Bateria Fraca - Piscando no modo de bateria fraca com alarme
Sólido ligado durante o corte
Sobrecarga - Piscando no corte de sobrecarga com alarme
Sólido ligado durante o corte
Modo de carregamento - piscando no modo de carregamento
Sólido LIGADO durante a absorção
Indicação de rede - LED aceso
Especificações do circuito
Circuito de controle baseado em microcontrolador de 8 bits
Topologia do inversor de ponte H
Detecção de falha de comutação Mosfet
Algoritmo de carregamento: modo de alternância baseado em PWM Mosfet Controlador de carregador de 5 A / 15 A
Carregamento em 2 etapas Etapa 1: Modo de reforço (flash LED)
Etapa 2: Modo de absorção (led aceso)
Inicialização do ventilador DC para resfriamento interno durante a operação de carregamento / inv
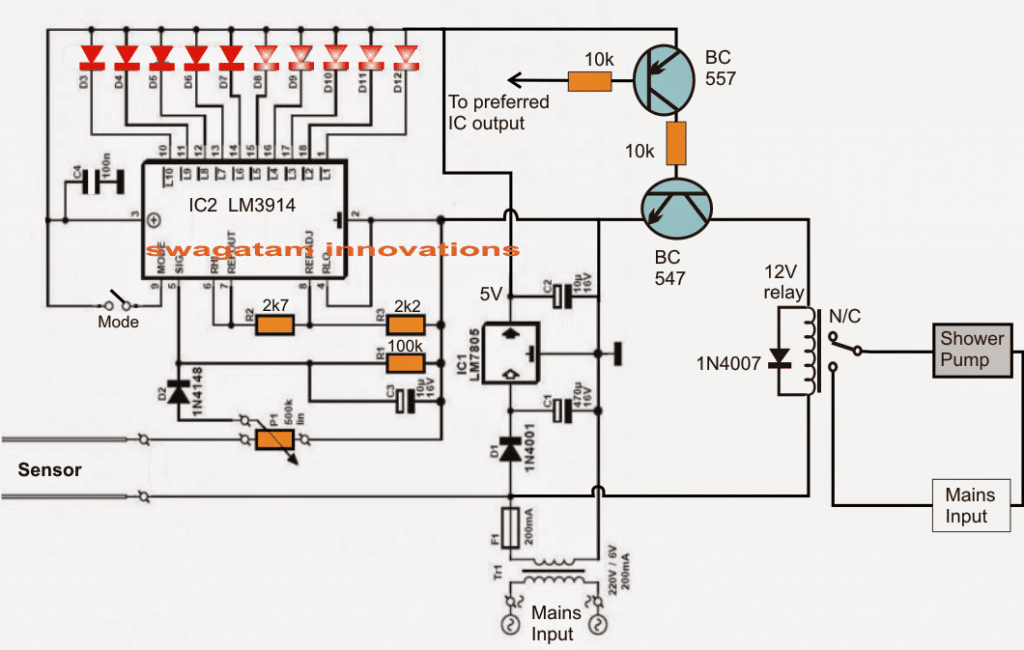
Diagrama de circuito:

Códigos PIC podem ser vistos AQUI
Detalhes do PCB são fornecidos AQUI
A explicação a seguir fornece os detalhes dos vários estágios do circuito envolvidos no projeto:
ATUALIZAR:
Você também pode consultar este muito fácil de construir Circuito inversor baseado em Arduino de onda senoidal pura.
No Modo Inversor
Assim que a rede falha, a lógica da bateria é detectada no pino nº 22 do IC, que instantaneamente avisa a seção do controlador para alternar o sistema no modo inversor / bateria.
Neste modo, o controlador começa a gerar os PWMs necessários por meio de seu pino # 13 (saída ccp), no entanto, a taxa de geração de PWM é implementada somente após o controlador confirmar o nível lógico no pino # 16 (interruptor INV / UPS).
Se uma lógica alta for detectada neste pino (modo INV), o controlador inicia um ciclo de trabalho totalmente modulado que está em torno de 70%, e no caso de uma lógica baixa na pinagem indicada do IC, então o controlador pode ser solicitado a gerar rajada de PWMs variando de 1% a 70% a uma taxa de período de 250 ms, que é denominado como saída de atraso suave enquanto no modo UPS.
O controlador simultaneamente com os PWMs também gera uma lógica de 'seleção de canal' por meio do pino nº 13 do PIC, que é posteriormente aplicada ao pino nº 8 do IC CD4081.
Ao longo do período de tempo inicial do pulso (ou seja, 10ms), o pino 12 do controlador PWM é processado alto de modo que o PWM possa ser obtido exclusivamente do pino 10 do CD4081 e após 10 ms, o pino 14 do controlador é lógico alto e o PWM é acessível a partir do pino 11 de CD4081, como resultado, usando este método, um par de PWM antifásicos torna-se acessível para ligar os MOSFETs.
Além disso, uma lógica alta (5V) torna-se acessível a partir do pino 11 do controlador PWM, este pino fica alto cada vez que o inversor é ligado e acaba ficando baixo quando o inversor está desligado. Esta lógica alta é aplicada ao pino 10 de cada um dos drivers MOSFET U1 e U2, (pino HI) para ativar os MOSFETs do lado alto dos dois bancos mosfet.
Para atualizar o microcontrolador proposto Sinewave UPS, os seguintes dados podem ser usados e implementados de forma adequada.

Os dados a seguir fornecem os detalhes completos do enrolamento do transformador:

Feedback do Sr. Hisham:
Oi Sr. Swagatam, como vai?
Eu quero dizer a você que o esquema do inversor de onda senoidal pura tem alguns erros, 220uf capacitor bootstrap deve ser substituído por um (22uf ou 47uf ou 68uf) ,,, um capacitor de 22uf que está conectado entre o pino 1 e o pino 2 do ir2110 de 2 está errado e deve ser removido, também um código hexadecimal chamado eletech. Hex não deve ser usado porque faz com que o inversor desligue após 15 segundos com bateria fraca e buzer buzina, se você tiver uma grande ventoinha CC, então os transistores devem ser substituídos por uma corrente mais alta, para segurança dos mosfets um regulador 7812 é recomendado para ser conectado ir2110 ... também há d14, d15 e d16 não devem ser conectados ao aterramento.
Eu testei este inversor e sua onda senoidal realmente pura, eu liguei uma máquina de lavar e ela está funcionando silenciosamente e sem nenhum ruído, conectei um capcitor 220nf na saída em vez de 2,5uf, a geladeira também está funcionando, vou compartilhar algumas fotos em breve.
Atenciosamente


O esquema discutido no artigo acima foi testado e modificado com algumas correções apropriadas pelo Sr. Hisham, conforme mostrado nas imagens a seguir, os visualizadores podem consultá-los para melhorar o desempenho do mesmo:


Agora vamos estudar como o estágio de troca de mosfet pode ser construído por meio da seguinte explicação.

Troca de MOSFET:
Verificar com Comutação MOSFET diagrama de circuito abaixo:

Neste caso, o driver mosfet U1 (IR2110) e U2 (IR2110) lado alto / lado baixo são empregados, verifique a folha de dados deste IC para entender mais. Neste, os dois bancos MOSFET com MOSFETs de lado alto e lado baixo são destinados à comutação do lado primário do transformador.
Neste caso, estamos discutindo o funcionamento do banco (aplicando IC U1) apenas uma vez que a condução do banco suplementar não difere entre si.
Assim que o inversor está LIGADO, o controlador torna o pino 10 de U1 lógico alto, o que subsequentemente ativa os MOSFETs do lado alto (M1 - M4) LIGADO, PWM para o canal 1 do pino 10 de CD4081 é aplicado ao pino 12 do drver IC (U1 ) e da mesma forma é administrado à base de Q1 por meio de R25.
Enquanto o PWM é lógico alto, o pino 12 de U1 também é lógico alto e aciona os MOSFETs do lado inferior do banco 1 (M9 - M12), alternativamente, ele ativa o transistor
Q1 que correspondentemente torna a tensão do pino 10 da lógica U1 baixa, desligando os MOSFETs do lado alto (M1 - M4).
Portanto, isso implica que, por padrão, a lógica alta do pino 11 do microcontrolador é LIGADO para os MOSFETs do lado alto entre os dois arranjos de mosfet, e enquanto o PWM associado é alto, os MOSFETs do lado baixo são LIGADOS e os MOSFETs do lado alto são DESLIGADOS, e desta forma a sequência de comutação continua se repetindo.
Proteção Mosfet Switching
Pin11 de U1 pode ser usado para executar o mecanismo de travamento de hardware de cada uma das unidades de drivers.
Pelo modo fixo padrão, este pino pode ser visto como fixo com uma lógica baixa, mas sempre que, em qualquer circunstância, a comutação MOFET do lado inferior falha ao iniciar (vamos supor através de curto-circuito o / p ou geração errônea de pulso na saída), a tensão VDS de Pode-se esperar que os MOSFETs do lado inferior disparem, o que imediatamente faz com que o pino 1 de saída do comparador (U4) vá alto e se torne travado com a ajuda de D27 e renderize o pino 11 de U1 e U2 na lógica alta e, assim, desligue os dois O driver do MOSFET é executado de forma eficaz, evitando que os MOSFETs sejam queimados e danificados.
O pino 6 e o pino 9 são de + VCC do IC (+ 5V), o pino 3 é de + 12 V para a alimentação da unidade da porta MOSFET, o pino 7 é a unidade da porta MOSFET do lado alto, o pino 5 é a rota de recepção do MOSFET do lado alto, o pino 1 é o MOSFET do lado baixo drive e pin2 é o caminho de recepção do MOSFET do lado inferior. o pino 13 é o aterramento do IC (U1).
PROTEÇÃO DE BATERIA FRACA:
Enquanto o controlador opera no modo inversor, ele monitora repetidamente a tensão em seu pino 4 (sentido BATT), pino 7 (sentido OVER LOAD) e pino 2 (sentido CA PRINCIPAL).
Se a tensão no pino 4 subir acima de 2,6 V, o controlador não perceberá e pode ser visto escapando para o modo de detecção suplementar, mas assim que a tensão aqui cair para cerca de 2,5 V, o estágio do controlador proibirá seu funcionamento neste ponto , desligando o modo do inversor de modo que o LED de bateria fraca ligue e solicite o campainha para apitar .
SOBRE CARGA:
A proteção contra sobrecarga é uma funcionalidade obrigatória implementada na maioria dos sistemas de inversores. Aqui, para desligar o inversor no caso de a carga ir além das especificações de carga segura, a corrente da bateria é primeiro detectada na linha negativa (ou seja, a queda de tensão no fusível e o caminho negativo do banco MOSFET do lado inferior ) e esta tensão bastante reduzida (em mV) é proporcionalmente intensificada pelo comparador U5 (composição dos pinos 12,13 1º 14) (fazer referência ao diagrama do circuito).
Esta saída de tensão amplificada do pino 14 do comparador (U5) é montada como amplificador inversor e aplicada ao pino 7 do microcontrolador.
O software compara a tensão com a referência, que é para este pino em particular é 2V. Bem como falado anteriormente, o controlador detecta as tensões neste pino, além de operar o sistema no modo inversor, toda vez que a corrente de carga aumenta, a tensão neste pino aumenta.
Sempre que a tensão no pino 7 do IC do controlador estiver acima de 2 V, o processo desliga o inversor e muda para o modo de sobrecarga, desligando o inversor, ligando o LED de sobrecarga e fazendo com que o buzzer apite, que após 9 bipes avisa o inversor para LIGADO novamente, inspecionando a tensão no pino 7 uma segunda vez, suponha que caso o controlador identifique a tensão do pino 7 abaixo de 2 V, ele opera o inversor no modo normal, caso contrário, ele desconecta o inversor novamente, e este processo é conhecido como modo de reinicialização automática.
Como neste artigo, articulamos de antemão que quando no modo inversor, o controlador lê a tensão em seu pino 4 (para bateria baixa), pino 7 (para sobrecarga) e pino 2 para status de tensão principal CA. Compreendemos que o sistema pode estar funcionando em modo duplo (a) modo UPS, (b) modo inversor.
Portanto, antes de inspecionar a tensão do pino 2 do PIC, a rotina antes de qualquer coisa confirmar em que modo a unidade pode estar funcionando, detectando a lógica alta / baixa no pino 16 do PIC.
Mudança do inversor para a rede elétrica (INV-MODE):
Neste modo particular, assim que a tensão principal CA for detectada estar próxima de 140 V CA, a ação de mudança pode ser visto implementado, este limite de tensão é pré-configurável pelo usuário, implica que nos casos em que a tensão do pino 2 estiver acima de 0,9 V, o IC do controlador pode desligar o inversor e mudar para o modo de rede, onde o sistema examina o tensão do pino 2 para testar a falha da rede CA e manter o processo de carregamento, que neste artigo iremos explicar mais tarde.
Mudança do inversor para bateria (UPS-MODE):
Dentro desta configuração, cada vez que a tensão principal CA está nas proximidades de 190 V CA, a mudança pode ser vista impondo ao modo de bateria, este limite de tensão também é pré-definido por software, o que significa que sempre que a volagem do pino 2 estiver acima de 1,22 V, o controlador pode estar Espera-se que ligue o inversor e mude para a rotina da bateria, em que o sistema inspeciona a tensão do pino 2 para verificar a ausência da rede CA e opera o cronograma de carregamento que discutiremos mais adiante neste artigo.
CARREGAMENTO DA BATERIA:
No decurso de MAINs ON, o carregamento da bateria pode ser iniciado. Como podemos entender, enquanto no modo de carregamento da bateria, o sistema pode estar funcionando usando a técnica SMPS, vamos agora entender o princípio de funcionamento por trás disso.
Para carregar a bateria, o circuito de saída (MOSFET e transformador inversor) torna-se efetivo na forma de um conversor boost.
Neste caso, todos os MOSFETs do lado inferior dos dois arranjos de mosfet funcionam em sincronia como um estágio de chaveamento, enquanto o primário do transformador do inversor se comporta como um indutor.
Assim que todos os MOSFETs do lado baixo são LIGADOS, a energia elétrica fica acumulada na seção primária do transformador, e assim que os MOSFETs são DESLIGADOS, esta energia elétrica acumulada é retificada pelo diodo embutido dentro dos MOSFETs e A CC é chutada de volta para a bateria, a medida dessa tensão aumentada dependeria do tempo de ativação dos MOSFETs do lado baixo ou simplesmente da relação marca / espaço do ciclo de trabalho usado para o processo de carregamento.
PWM WORKING
Enquanto o equipamento pode estar conduzindo no modo ligado, o PWM de carga (do pino 13 do micro) é progressivamente aumentado de 1% para a especificação mais alta, no caso do PWM aumentar a tensão DC para a bateria, a tensão da bateria também aumenta, o que resulta em um surto na corrente de carga da bateria.
O corrente de carga da bateria é monitorado através do fusível DC e trilho negativo do PCB e a tensão é adicionalmente intensificada pelo amplificador U5 (pin8, ppin9 e pin10 do comparador), esta tensão amplificada ou corrente detectada é aplicada ao pin5 do microcontrolador.
Esta tensão do pino é programada no software na forma de 1 V, assim que a tensão neste pino subir acima de 1 V, o controlador pode ser visto restringindo o ciclo de trabalho PWM até que finalmente seja reduzido para abaixo de 1 V, assumindo a tensão neste pino for diminuída para menos de 1 V, o controlador começaria instantaneamente a melhorar a saída PWM total, e pode-se esperar que o processo continue dessa maneira com o controlador mantendo a tensão neste pino em 1 V e, consequentemente, o limite de corrente de carga.
TESTE E LOCALIZAÇÃO DE FALHAS DO SINEWAVE UPS
Construa a placa confirmando cada fiação, incluindo conectividade de LED, interruptor ON / OFF, feedback via transformador inversor, sensor de rede de 6 volts para CN5, -VE de bateria para cartão, + VE de bateria para dissipador de calor grande.
Inicialmente, não conecte o transformador primário ao par de dissipadores de calor pequenos.
Conecte o fio da bateria + ve ao PCB via MCB e um amperímetro de 50 amperes.
Antes de prosseguir para os testes recomendados, certifique-se de verificar a tensão + VCC nos pinos do
U1 - U5 na seguinte seqüência.
U1: pino # 8 e 9: + 5V, pino # 3: + 12V, pino # 6: + 12V,
U2: pino # 8 e 9: + 5V, pino # 3: + 12V, pino 6: + 12V,
U3: pino 14: + 5 V, U4: pino 20: + 5 V, pino 1: + 5 V, U5: pino 4: + 5 V.
1) Ligue o MCB da bateria e verifique o amperímetro e também certifique-se de que ele não ultrapasse 1 ampere. Se o ampere disparar, remova U1 e U2 brevemente e LIGUE o MCB novamente.
2) Ligue alternando o interruptor LIGA / DESLIGA dado do inversor e verifique se o relé liga ou não, iluminando o LED 'INV'. Se não, verifique a tensão no pino # 18 do PIC, que é suposto ser 5V. Se estiver ausente, verifique os componentes R37 e Q5, um deles pode estar com defeito ou conectado incorretamente. Se você encontrar o LED 'INV' não acendendo, verifique se a tensão no pino # 25 do PIC é de 5V ou não.
Se a situação acima estiver em execução normalmente, vá para a próxima etapa conforme descrito abaixo.
3) Usando um pino de teste de osciloscópio # 13 do PIC alternadamente LIGA / DESLIGA a chave do inversor, você pode esperar ver um sinal PWM bem modulado aparecendo nesta pinagem cada vez que a entrada principal do inversor for DESLIGADA, se não, então você pode assumir que o PIC está com defeito, a codificação não foi implementada corretamente ou o IC está mal soldado ou inserido em seu soquete.
Se você conseguir obter a alimentação PWM modificada esperada sobre este pino, vá para o pino # 12 / no # 14 do IC e verifique a disponibilidade de frequência de 50 Hz nesses pinos, caso contrário, indicaria alguma falha na configuração do PIC, remova e substitua-o. Se você deseja obter uma resposta afirmativa nesses pinos, vá para a próxima etapa, conforme explicado abaixo.
4) O próximo passo seria testar o pino # 10 / pino # 12 do IC U3 (CD4081) para os PWMs modulados que são finalmente integrados com os estágios U1 e U2 do driver mosfet. Além disso, você também deverá verificar as diferenças de potencial no pino nº 9 / pino nº 12, que deve estar em 3,4 V aproximadamente, e no pino nº 8 / pino nº 13, pode ser verificado estar em 2,5 V. Da mesma forma, verifique se o pino nº 10/11 está em 1,68 V.
No caso de você não conseguir identificar o PWM modulado através dos pinos de saída do CD4081, então você gostaria de verificar as faixas que terminam nos pinos relevantes do IC CD4081 do PIC, que podem estar quebrados ou de alguma forma obstruindo os PWMs de alcançar U3 .
Se tudo estiver bem, vamos passar para o próximo nível.
5) Em seguida, conecte o CRO com a porta U1, ligue / desligue o inversor e como feito acima verifique os PWMs neste local que são M1 e M4, e também as portas M9, M12, porém não se surpreenda se o PWM comutação são vistos fora da fase M9 / M12 em comparação com M1 / M4, isso é normal.
Se os PWMs estiverem totalmente ausentes nessas portas, você pode verificar o pino nº 11 de U1, que deve estar baixo e, se for encontrado alto, indicará que U1 pode estar funcionando no modo de desligamento.
Para confirmar esta situação, verifique a tensão no pino 2 de U5, que pode ser 2,5 V, e o pino 3 de U5 pode estar em 0 V ou menos de 1 V, se for detectado que está abaixo de 1 V, prossiga e verifique R47 / R48, mas se a tensão estiver acima de 2,5 V, verifique D11, D9, juntamente com os mosfets M9, M12 e os componentes relevantes em torno dele para solucionar o problema persistente, até que seja corrigido de forma satisfatória.
No caso em que o pino # 11 do U1 é detectado baixo e ainda assim você não consegue encontrar os PWMs do pino # 1 e do pino # 7 do U1, então é hora de substituir o IC U1, o que possivelmente corrigirá o problema, o que irá nos incita a passar para o próximo nível abaixo.
6) Agora repita os procedimentos exatamente como feito acima para as portas da matriz mosfet M5 / M18 e M13 / M16, a solução de problemas seria exatamente como explicada, mas com referência a U2 e os outros estágios complementares que podem estar associados a esses mosfets
7) Depois que os testes e a confirmação acima forem concluídos, agora é finalmente hora de conectar o transformador primário aos dissipadores de calor mosfet, conforme indicado no diagrama de circuito do UPS de onda senoidal. Uma vez configurado, ligue a chave do inversor, ajuste o VR1 predefinido para acessar com sorte a AC de onda senoidal constante regulada de 220 V necessária através do terminal de saída do inversor.
Se você achar que a saída está excedendo esse valor ou abaixo desse valor, e sem a regulamentação esperada, você pode procurar os seguintes problemas:
Se a saída for muito mais alta, verifique a tensão no pino # 3 do PIC, que é suposto estar em 2,5 V, se não, verifique o sinal de feedback derivado do transformador do inversor para o conector CN4, verifique novamente a tensão em C40 e confirme o exatidão dos componentes R58, VR1 etc. até que o problema seja corrigido.
8) Depois disso, conecte uma carga apropriada ao inversor e verifique a regulação, uma falha de 2 a 3 por cento pode ser considerada normal, se ainda assim você falhar em uma regulação, então verifique os diodos D23 ---- D26, você pode esperar um dos estes podem estar com defeito ou você também pode tentar substituir o C39, C40 para corrigir o problema.
9) Assim que os procedimentos acima forem concluídos com sucesso, você pode continuar verificando o funcionamento do LOW-BATT. Para visualizar isso, experimente fazer um curto-circuito no R54 com a ajuda de um par de pinças do lado do componente, o que deve fazer com que o LED LOW-Batt se acenda e a campainha apite por um período de cerca de 9 segundos na taxa de um bipe por segundo aproximadamente.
Caso o acima não aconteça, você pode verificar o pino # 4 do PIC, que deve estar normalmente acima de 2,5 V, e qualquer coisa abaixo disso aciona a indicação de advertência de bateria baixa. Se um nível de tensão irrelevante for detectado aqui, verifique se R55 e R54 estão ou não funcionando corretamente.
10) Em seguida, seria o recurso de desarme por sobrecarga que precisaria ser confirmado. Para o teste, você pode selecionar uma lâmpada incandescente de 400 Wait como a carga e conectá-la à saída do inversor. Ajustando VR2, o disparo de sobrecarga deve iniciar em algum ponto na rotação predefinida.
Para ser preciso, verifique a tensão no pino nº 7 do PIC onde, sob condições de carga corretas, a tensão estará acima de 2 V e qualquer coisa acima deste nível acionará a ação de corte de sobrecarga.
Com uma amostra de 400 watts, tente variar a predefinição e tente forçar um corte de sobrecarga para iniciar, se isso não acontecer, verifique a tensão no pino # 14 de U5 (LM324), que é suposto ser superior a 2,2 V, se não em seguida, verifique R48, R49, R50 e também R33 qualquer um deles pode estar com defeito, se tudo estiver correto aqui, basta substituir U5 por um novo IC e verificar a resposta.
Como alternativa, você também pode tentar aumentar o valor de R48 para cerca de 470 K ou 560 K ou 680 K etc. e verificar se isso ajuda a resolver o problema.
11) Quando a avaliação do processamento do inversor estiver concluída, experimente a mudança de rede. Mantenha a chave de modo no modo de inversor (mantenha CN1 aberto), ligue o inversor, conecte o fio de rede ao variac, aumente a tensão variac para 140 V AC e verifique se o acionamento da troca de energia para a rede ocorre ou não. Se você não encontrar nenhuma mudança nesse caso, confirme a tensão no pino 2 do microcontrolador, ela precisa ser> 1,24 V, caso a tensão seja menor que 1,24 V, então inspecione a tensão do transformador de detecção (6 V CA em seu secundário) ou dê uma olhada nos componentes R57, R56.
Agora que a mudança aparece, diminua a escala da tensão variável para abaixo de 90 V e examine se a ação de mudança da rede para o inversor foi estabelecida ou não. A mudança deveria acontecer, pois agora a tensão no pino 2 do microcontrolador é inferior a 1V.
12) Logo após a conclusão da avaliação acima, experimente a mudança de rede no modo UPS. Habilitando a chave de modo no modo UPS (mantenha CN1 em curto) inicie o inversor, conecte o cabo de alimentação ao variac, aumente a tensão variac para cerca de 190 V CA e observe se a mudança de UPS para rede ocorre ou não. Se não houver nenhuma ação de mudança, basta dar uma olhada na tensão no pino 2 do microcontrolador, ela precisa ser superior a 1,66 V, desde que a tensão seja inferior a 1,66 V, então simplesmente confirme a tensão do transformador de detecção (6 V CA em seu secundário ) ou talvez inspecione os elementos R57, R56.
Logo depois que a mudança ocorrer, reduza a tensão variac para 180 V e descubra se a mudança da rede para o no-break ocorre ou não. A mudança deve acontecer, já que agora a tensão no pino 2 do microcontrolador pode ser testemunhada como acima de 1,5V.
13) Eventualmente, dê uma olhada no carregamento personalizado da bateria anexada. Segure a chave de modo no modo inversor, administre a rede elétrica e aumente a tensão variável para 230 V CA e determine a corrente de carga que deve aumentar suavemente no amperímetro.
Brinque com a corrente de carga variando VR3, de modo que a variação da corrente possa ser testemunhada variando entre cerca de 5 amperes e 12/15 amperes.
Apenas no caso de a corrente de carga ser vista como muito mais alta e não em uma posição para ser reduzida no nível preferido, então você pode tentar aumentar o valor de R51 para 100k e / ou se ainda assim não melhorar a corrente de carga para o nível esperado então, talvez você possa tentar diminuir o valor de R51 para 22K, por favor, tenha em mente que uma vez que a tensão equivalente detectada no pino 5 do microcontrolador torna-se em 2,5 V, o microcontrolador pode regular o PWM e, consequentemente, a corrente de carga.
No decorrer do modo de carregamento, lembre-se de que, precisamente o ramal inferior dos MOSFETs (M6-M12 / M13 - M16) estão mudando @ 8kHZ enquanto o ramal superior dos MOSFETs estão DESLIGADOS.
14) Além disso, você pode inspecionar a operação do VENTILADOR, o VENTILADOR está LIGADO cada vez que o inversor é LIGADO e o VENTILADOR pode ser visto como DESLIGADO sempre que o inversor está DESLIGADO. De maneira semelhante, o VENTILADOR é LIGADO assim que o carregamento está LIGADO e o VENTILADOR será DESLIGADO quando o carregamento estiver DESLIGADO
Anterior: Circuito verificador de integridade da bateria para teste de condição e backup da bateria Próximo: 3 circuitos de sensores de proximidade capacitivos fáceis explorados