Introdução
Os motores de indução monofásicos são amplamente utilizados em eletrodomésticos e controles industriais. O motor de indução monofásico Capacitor Split Permanente (PSC) é o motor mais simples e mais amplamente utilizado desse tipo.
Por design, os motores PSC são unidirecionais, o que significa que são projetados para girar em uma direção. Ao adicionar enrolamentos extras e relés e interruptores externos, ou usando mecanismos de engrenagem, a direção de rotação pode ser alterada. Nesta ideia, discutiremos em detalhes como controlar a velocidade de um motor PSC em ambas as direções usando um microcontrolador PIC16F72 e eletrônica de potência.
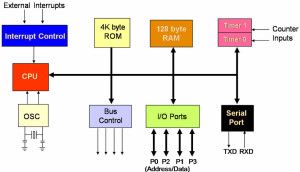
O microcontrolador PIC16F72 foi escolhido por ser um dos microcontroladores de uso geral mais simples e de baixo custo que a Microchip tem em seu portfólio. Mesmo que não tenha os PWMs no hardware para acionar saídas PWM complementares com banda morta inserida, todos os PWMs são gerados no firmware usando temporizadores e saída para pinos de saída de uso geral.
O que é unidade de frequência variável?
O inversor de frequência variável ou VFD é a maneira que permite o controle da velocidade do motor de indução aplicando a frequência variável da tensão de alimentação CA. Ao controlar a frequência CA de saída, é possível acionar o motor em velocidades diferentes com base nos requisitos. São acionamentos de velocidade ajustável amplamente utilizados em aplicações industriais, como bombas, sistemas de ventilação, elevadores, acionamentos de máquinas-ferramenta, etc. É essencialmente um sistema de economia de energia. Portanto, o primeiro requisito é gerar uma onda senoidal com frequências diferentes para VFD.
Qual é a tecnologia adotada em VFD?
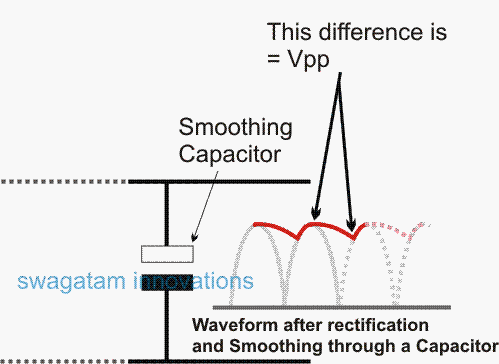
É o sistema que dá saída AC com frequência variável para controlar a velocidade do motor de acordo com as necessidades. Os inversores de frequência variável monofásicos são mais comuns, pois a maioria dos dispositivos funciona com alimentação CA monofásica. Consiste em um retificador de ponte de onda completa para converter 230/110 volts AC em aproximadamente 300/150 volts DC. A saída DC do retificador de ponte é suavizada por um capacitor de suavização de alto valor para remover as ondulações de AC. Esta tensão fixa DC é então alimentada para o circuito de geração de frequência formado por transistores MOSFET (transistor de efeito de campo de óxido metálico) / IGBT (transistor bipolar de porta isolada). Este circuito MOSFET / IGBT recebe a CC e a converte em CA com frequência variável para controlar a velocidade do dispositivo.
A mudança de frequência pode ser alcançada usando circuitos eletrônicos ou microcontrolador. Este circuito varia a frequência de tensão (PWM) aplicada ao gate drive do circuito MOSFET / IGBT. Assim, a tensão CA de frequência variável aparece na saída. O microcontrolador pode ser programado para alterar a frequência de saída de acordo com as necessidades.
O sistema VFD:
O dispositivo de frequência variável tem três partes, como um motor CA, um controlador e uma interface operacional.
O motor AC usado no VFD é geralmente um motor de indução trifásico, embora o motor monofásico motor é usado em alguns sistemas. Os motores projetados para operação em velocidade fixa geralmente são usados, mas alguns projetos de motor oferecem melhor desempenho no VFD do que o projeto padrão.
A parte do controlador é o circuito do conversor de energia eletrônico sólido para converter CA em CC e, em seguida, em CA de onda quase senoidal. A primeira parte é a seção do conversor CA para CC com uma ponte retificadora de onda completa, geralmente uma ponte trifásica / monofásica de onda completa. Este intermediário CC é então convertido em CA de onda quase senoidal usando o circuito de comutação do inversor. Aqui, os transistores MOSFET / IGBT são usados para inverter DC para AC.
A seção do inversor converte DC em três canais de AC para acionar o motor trifásico. A seção do controlador também pode ser projetada para fornecer fator de potência aprimorado, menos distorção harmônica e baixa sensibilidade aos transientes CA de entrada.
Controle de Volts / Hz:
O circuito do controlador regula a frequência da CA fornecida ao motor por meio do método de controle de volts por hertz. O motor CA requer tensão aplicada variável quando a frequência muda para fornecer o torque especificado. Por exemplo, se o motor foi projetado para funcionar em 440 volts a 50 Hz, a CA aplicada ao motor deve ser reduzida à metade (220 volts) quando a frequência muda para a metade (25 Hz). Este regulamento é baseado em Volts / Hz. No caso acima, a relação é 440/50 = 8,8 V / Hz.
 Outros métodos de controle de tensão:
Outros métodos de controle de tensão:
 Outros métodos de controle de tensão:
Outros métodos de controle de tensão:Além do controle de Volts / Hz, métodos mais avançados, como Controle Direto de Torque ou DTC, Modulação de largura de pulso de vetor de espaço (SVPWM) , etc. também são usados para controlar a velocidade do motor. Ao controlar a tensão no motor, o fluxo magnético e o torque podem ser controlados com precisão. No método PWM, os interruptores do inversor produzem uma onda quase senoidal por meio de uma série de pulsos estreitos com durações de pulso variáveis pseudo-sinusoidais.
Interface operacional:
Esta seção permite que o usuário dê partida / desligue o motor e ajuste a velocidade. Outras instalações incluem reversão do motor, alternância entre controle de velocidade manual e automático, etc. A interface operacional consiste em um painel com visor ou indicadores e medidores para mostrar a velocidade do motor, tensão aplicada, etc. Um conjunto de interruptores de teclado geralmente são fornecidos para controlar o sistema.
Inbuilt -Soft Start:
Em um motor de indução comum, ligado por meio de uma chave CA, a corrente consumida é muito maior que o valor nominal e pode aumentar com o aumento da aceleração da carga para atingir a velocidade total do motor.
Por outro lado, em um motor controlado por VFD, inicialmente é aplicada baixa tensão em baixa frequência. Essa frequência e tensão aumentam em uma taxa controlada para acelerar a carga. Isso desenvolve quase mais torque do que o valor nominal do motor.
Comutação do motor VFD :
A frequência e a tensão aplicada são primeiro reduzidas a um nível controlado e depois continuam diminuindo até chegar a zero e o motor desligar.
Circuito de aplicação para controlar a velocidade do motor de indução monofásico
A abordagem é relativamente fácil no que diz respeito ao circuito de força e ao circuito de controle. No lado da entrada, dobradores de tensão são usados e no lado da saída uma ponte H, ou inversor de 2 fases, é usado conforme mostrado na Figura 2. Uma extremidade dos enrolamentos principal e inicial são conectadas a cada meia ponte e o outras extremidades são conectadas ao ponto neutro da fonte de alimentação CA.
O circuito de controle requer quatro PWMs com dois pares complementares com uma banda morta suficiente entre as saídas complementares. As bandas mortas PWM são PWM0-PWM1 e PWM2-PWM3. O PIC16F72 não tem PWMs projetados no hardware para produzir da maneira que precisamos. Com relação à VF, o barramento CC é sintetizado variando a frequência e a amplitude. Isso resultará em duas tensões sinusoidais fora de fase.
Se a tensão aplicada ao enrolamento principal atrasar o enrolamento inicial em 90 graus, o motor funciona em uma direção (ou seja, para frente). Se quisermos mudar a direção da rotação, a tensão aplicada ao enrolamento principal deve conduzir o enrolamento de partida.
Espero que você tenha uma ideia sobre o conversor de frequência variável para o motor de indução com base no artigo acima. então, se você tiver alguma dúvida sobre este conceito ou o elétrico e projeto eletrônico por favor deixe a seção de comentários abaixo.