Este circuito de tacômetro analógico leve e útil foi desenvolvido para facilitar o carro ou a mecânica de manutenção de automóveis para ajustar com precisão o RPM do sistema de ignição de um carro para obter a máxima eficiência dele. O circuito proposto é, na verdade, um projeto combinado de um tacômetro e um medidor de permanência.
Inscrição
O circuito do tacômetro analógico pode ser aplicado para analisar o tempo de ignição em vários RPMs, junto com uma lâmpada de tempo. Quando o circuito é utilizado na forma de medidor de permanência, ele pode ser utilizado para a leitura do ângulo em que o pulso de ignição é ligado, podendo assim fornecer as informações necessárias ao mecânico de automóveis quanto ao ajuste de temporização do circuito CDI.
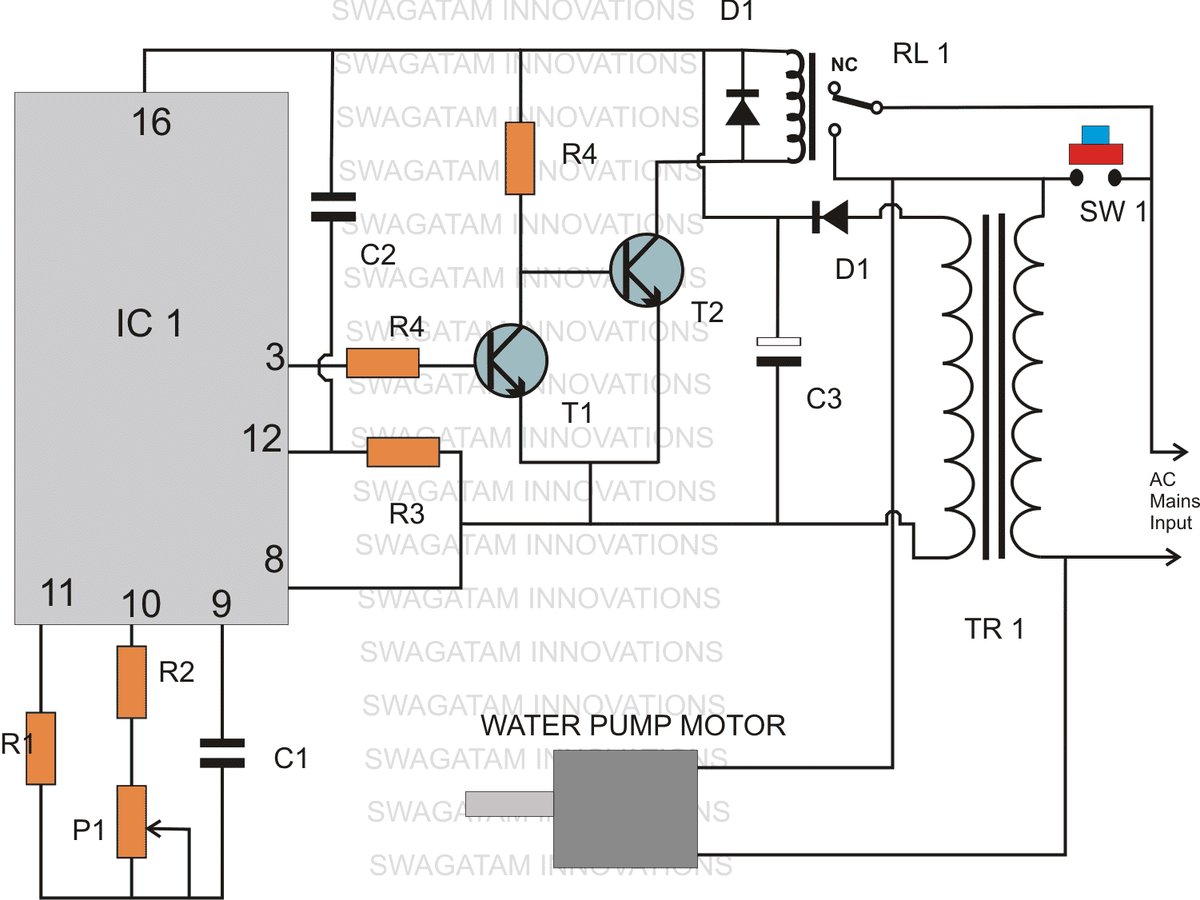
A configuração completa é demonstrada na figura abaixo e é projetada para carros ou automóveis com sistema de aterramento negativo, que a maioria dos carros contemporâneos possui.
A ideia também pode ser adaptada para veículos de terra positivos conectando todos os diodos e capacitores eletrolíticos com polaridade reversa e substituindo os transistores PNP por NPN e vice-versa. O circuito é alimentado pela própria bateria do carro. O funcionamento do circuito pode ser entendido com os seguintes pontos:
Como funciona o circuito

Troque os pinos do emissor / coletor do T7 que estão orientados incorretamente no diagrama
Os transistores T1 e T2 são manipulados como um gatilho Schmitt. Enquanto nenhum pulso positivo for detectado na entrada da bobina de pickup, T1 permanece desligado e T2 é ligado, o que significa que T4 está além disso ligado. Isso faz com que uma voltagem positiva correspondente à voltagem de alimentação da bateria menos a voltagem do emissor base T4 seja gerada no emissor T4.
No entanto, quando um pulso positivo é gerado da bobina de pickup, T1 é ativado e o gatilho Schmitt alterna o caminho oposto.
T4 é neste ponto desligado, fazendo com que a tensão existente em seu emissor se torne zero. A tensão média no emissor T4 é, como resultado, proporcional à razão do tempo de comutação ON / OFF da bobina de captação, ou seja, este valor de tensão é determinado pelo ângulo de contato.
Quando a chave S1 está na posição 'a', a corrente média através do medidor também dependerá do ângulo de parada, portanto, o medidor pode ser graduado linearmente em relação ao ângulo de parada.
Quando a chave está na posição 'b', o circuito funciona simplesmente como um tacômetro. C2 funciona como um diferenciador para os pulsos vindos do coletor T3 e a saída resultante é usada para ativar um estágio monoestável construído em torno dos transistores T5 e T6.
O monoestável gera uma saída PWM constante, no entanto, conforme a rotação do motor aumenta, o ciclo de trabalho dos pulsos também aumenta. A tensão média no emissor T7 e, portanto, a corrente média através do medidor, agora depende da relação entre o período de 'pulso' e 'sem pulso'. Isso significa que conforme a r.p.m. aumenta e a largura dos pulsos fica maior, a corrente através do medidor também aumenta linearmente.
Como calibrar
O dispositivo pode ser calibrado da seguinte maneira: Com S1 na posição 'a', conecte a entrada R1 à linha de aterramento e, em seguida, faça o ajuste fino de P1 para obter uma deflexão de escala total do medidor. Isso se torna equivalente a um ângulo de contato de 360 ° e a escala pode ser calibrada linearmente de 0 a 360 graus.
A escala do tacômetro deve ser calibrada com a escala completa para que corresponda à maior r.p.m. Para a maioria das aplicações, 8000 podem ser apenas adequados.
Se a ferramenta for aplicada em motores de quatro e seis cilindros, nesse caso pode ser necessário um par de escalas ou S1 pode precisar ser substituído por um interruptor de 3 pólos e P2 precisa ser replicado para corresponder a uma única escala para várias gamas de motores. Isso ocorre porque um motor de seis cilindros gera proporcionalmente muito mais pulsos para uma rotação específica.
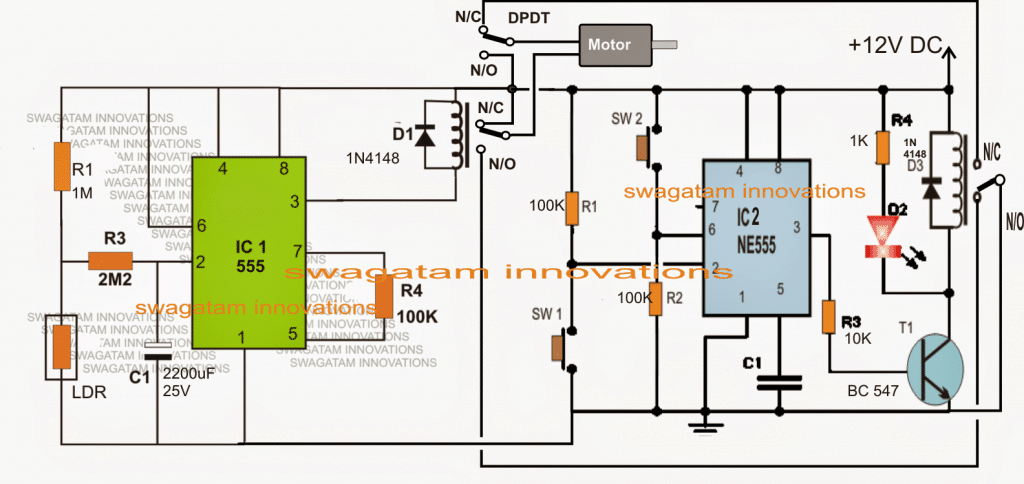
O dispositivo pode ser calibrado com a ajuda do transformador básico / circuito em ponte mostrado, que produz uma forma de onda de 100 Hz.

A frequência de 100 Hz torna-se equivalente a 3000 r.p.m. para um motor de quatro cilindros e 2.000 r.p.m. para um motor de seis cilindros. A saída deste circuito é conectada à entrada do dispositivo tacômetro analógico e P2 é ajustado para otimizar uma deflexão e leitura precisas no medidor.
Anterior: Circuito de controle de luz estroboscópica de xenônio Próximo: Circuito UPS Sine Wave de 50 Watts