A postagem discute um mecanismo de engrenagem sem-fim de travamento automático para içar cargas pesadas por meio de um motor elétrico. A principal característica do sistema é o seu autotravamento em caso de falha do motor. A ideia foi solicitada pelo Sr. Amit Patkar.
Especificações técnicas
Amo eletrônica, principalmente automação, tenho feito coisas com kits da Lamington Road. mas como não tenho educação formal ou formação em eletrônica / engenharia, fico preso.
Eu adoro automação, talvez porque sou preguiçoso, mas continuo tendo ideias. Enquanto procurava por algum design que atendesse às minhas necessidades na web, felizmente, fui parar na sua página. Espero que você possa me sugerir uma boa ideia.
Ficamos no terceiro andar de um edifício de design antigo, sem elevador. Se eu mantiver minha bicicleta e as bicicletas de meus filhos no andar térreo, elas podem ser roubadas e tenho dores nas costas e é difícil carregar bicicletas por 3 andares sempre que um de nós precisa andar. Também consome área de carpete da casa.
Requerimento
Eu tenho uma grade forte onde um mecanismo de polia pode ser fixado. que pode ser operado com controle remoto.
1) Movimento horizontal da haste para colocar a polia a 3 pés de distância da estrutura do edifício para evitar danos a qualquer abrigo de janela.
2) Movimento vertical somente ao pressionar o botão remoto. Pare quando o botão for liberado. Isso evitará travamentos acidentais.
3) Pick up à base de borracha, pode colocar uma jaqueta de borracha nos ganchos. Para evitar danificar a pintura.
4) Quando verticalmente puxado para cima e horizontalmente para trás. Pode ser definido em ganchos manuais adicionais, para evitar pressão na polia.
5) se algum tipo de base for feita, ela pode ser usada para transportar coisas compradas na Dmart. HaHa.
deixe-me saber sua opinião.
Obrigado
Amit Ramakant Patkar.
Navi Mumbai.
O design
A ideia solicitada parece mais mecânica por natureza do que eletrônica, por isso é imperativo discutir primeiro a parte mecânica de forma elaborada.
O mecanismo de guincho de bicicleta controlado remotamente proposto precisa de um recurso muito importante a ser incluído no sistema, que é obviamente necessário para a maioria dos mecanismos de guincho com base em polia, é o recurso de travamento automático para evitar o desenrolamento reverso da polia em caso de falha do motor.
Empregando um mecanismo de engrenagem sem-fim
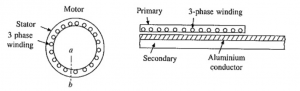
Uma maneira muito eficaz de implementar o recurso de travamento automático é empregando um sistema de engrenagem sem-fim, como pode ser visto na imagem abaixo.

Aqui vemos um eixo em forma de broca espiral horizontal com seus dentes travados dentro dos dentes de uma roda dentada circular normal.
Agora, conforme a engrenagem espiral é girada através de um motor, seus dentes tendem a empurrar e rolar no movimento para frente, empurrando os dentes da engrenagem circular na mesma direção, resultando em uma rotação sincronizada da engrenagem circular inferior.
A engrenagem circular é aquela que é usada para levantar ou mover a carga e no caso de o motor falhar devido a falha de energia ou qualquer outro mau funcionamento, a engrenagem espiral garante que os dentes da engrenagem circular travem entre os dentes da engrenagem espiral e se tornem quase imóvel em tais situações.
Este princípio é o que torna um sistema de engrenagem helicoidal mais desejável para o mecanismo de guincho de bicicleta proposto.
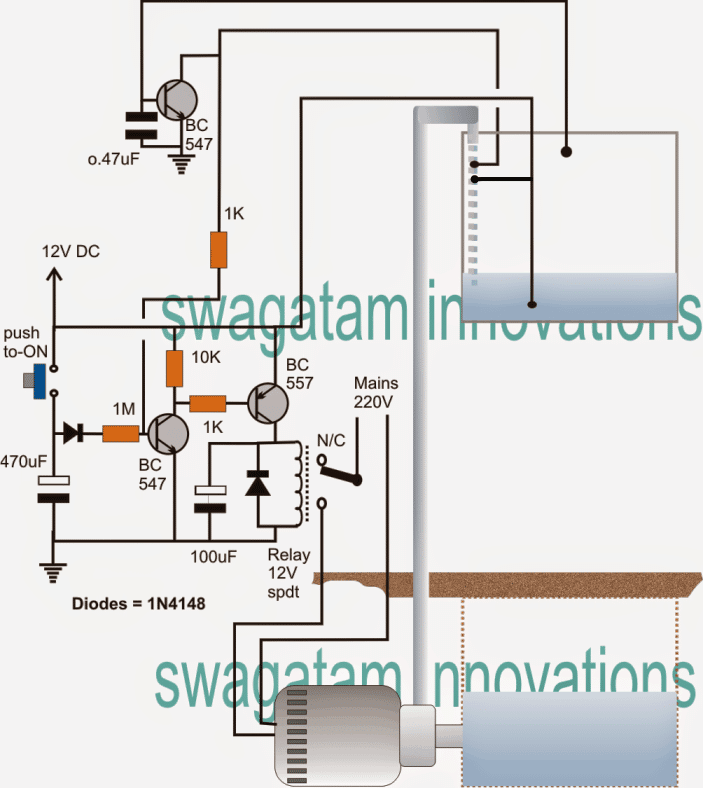
O diagrama a seguir mostra o método no qual o mecanismo de engrenagem helicoidal explicado acima pode ser implementado entre suportes paralelos e com a ajuda de dois cabos adjacentes e conjunto de polia.
De acordo com uma simulação visual, pode ser testemunhado que quando o motor é acionado, o conjunto de engrenagens começa a se mover em uma certa direção predeterminada de modo que a carga seja puxada para cima através do enrolamento da corda em torno das duas polias adjacentes, o inverso acontece quando o motor a direção é invertida.
A haste central que pode ser vista apoiada (pivotada) sobre estruturas firmes em ambos os lados deve ser reforçada com anéis de rolamento de esferas vedados para facilitar uma rotação suave de todo o sistema.

Como usar o controle remoto RF para o mecanismo
A discussão acima explicou como o mecanismo de elevação da polia precisa ser consertado, a seguir, de acordo com a solicitação, o motor deve ser controlado por meio de um circuito de controle remoto.
Hoje em dia, os módulos remotos de RF podem ser adquiridos de forma bastante barata e fácil nas lojas de eletrônicos locais, portanto, é recomendável comprar um em vez de tentar fazer um.
Você pode ler mais sobre isso neste POST
Para entusiastas do núcleo duro que gostariam de construir tudo com suas próprias mãos, um projeto de circuito relacionado é discutido neste POST
Caso você tenha adquirido módulos Rx, Tx prontos, você encontrará as unidades Rx receptor desses módulos RF com relés integrados, no entanto, esses relés podem ser bastante inferiores com sua capacidade de manuseio de carga e, portanto, devem ser reforçados com relés externos, especialmente quando a carga é um tipo de alta corrente como no presente pedido.
De preferência, compre um módulo de RF de dois relés porque precisamos de apenas dois relés para controlar os movimentos reversos para frente do motor. Um exemplo clássico de um módulo de dois relés pode ser visto na imagem a seguir.

Módulo Receiver Rx

Módulo de aparelho transmissor Tx
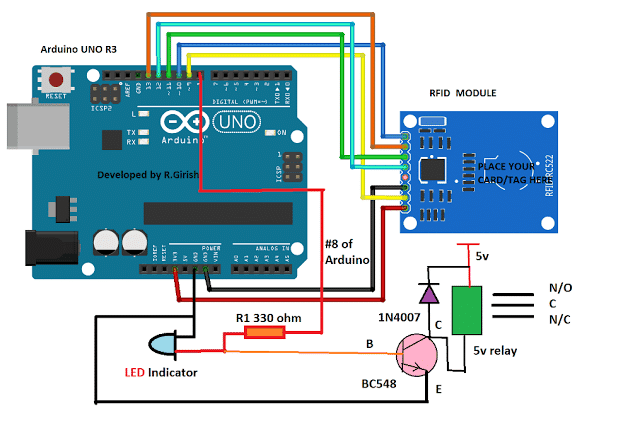
Os relés incluídos no Rx PCB irão operar em resposta ao pressionamento dos botões correspondentes no módulo transmissor Tx, então é tudo sobre traçar o N / O, N / C e os pólos desses dois relés e conectá-los com os relés externos de serviço pesado para impor os movimentos reversos para frente desejados do motor.
O diagrama a seguir detalha de forma abrangente o layout da fiação dos relés, uma vez que a fiação é concluída de acordo com o diagrama mostrado, um dos botões fará com que o motor gire no sentido horário enquanto que pressionar o outro inverterá a direção do motor no sentido anti-horário.

Quando nenhum botão estiver operacional, o motor ficará parado. O motor enrolaria ou desenrolaria as cordas da polia enquanto os botões relevantes do Tx fossem mantidos pressionados pelo usuário e pararia quando liberados.
Alternativamente, você pode tentar brincar com as conexões do seletor de operação de relé dos módulos Rx embutidos, inserindo os plugues apropriadamente até que a especificação necessária seja encontrada, em que o relé pode alternar entre ON / OFF com cada pressão alternada dos botões Tx e o usuário não precisa manter o botão Tx relevante pressionado continuamente para executar as rotações do motor pretendidas.
Anterior: Circuito Controlador de Ventilador de Ar PWM para Fogões de Biomassa Próximo: O que há de ilhamento no GTI (inversor de rede)