Nesta parte do artigo, aprendemos sobre um método inovador de conversão do mecanismo de pressão do pedal em veículos elétricos em um sinal elétrico de variação correspondente, que pode ser usado posteriormente para processar o controle de velocidade do veículo.
O conceito explicado funcionará como um acelerador eletrônico, que aumentará a velocidade do veículo linearmente quando o pedal for pressionado gradativamente, e vice-versa, usando a tecnologia PWM
A ideia foi solicitada pelo Sr.Lokesh Maini
Especificações técnicas
Eu sou um cara mecânico, atualmente trabalhando em um veículo elétrico e quero controlar a velocidade do meu motor usando pedal. Não estou recebendo um controlador para o meu motor, por favor, ajude-me a construir o meu próprio.
grato
As especificações do motor são motor cc escovado de 36 volts, 43 ampères e 1,5 hp.
O Projeto Mecânico
Uma versão eletrônica de um acelerador de pedal exigirá principalmente um mecanismo para primeiro converter o pressionamento mecânico do pedal em um sinal elétrico correspondente variável, de modo que este sinal possa ser processado através de um estágio de processador de sinal para a conversão desejada em um controle de velocidade prático do veículo.
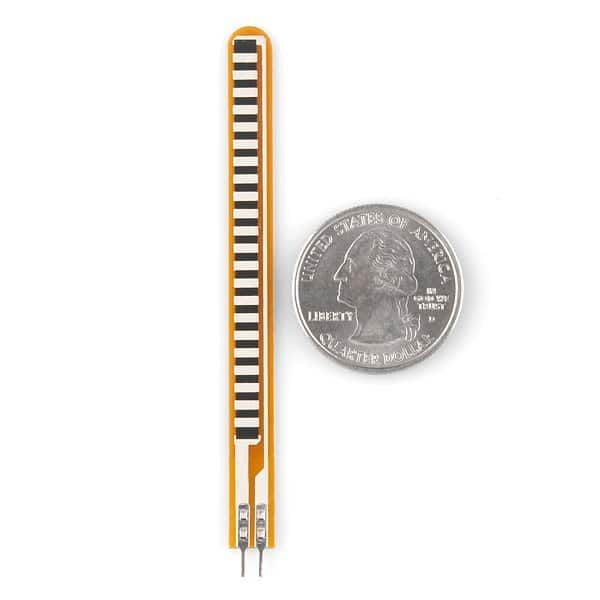
Muitos conceitos podem ser tentados, como o uso de um sensor de carga piezoelétrica, um sensor de carga capacitivo, por um sensor de ressonância, etc. Neste artigo, aprenderemos um método muito mais simples desenvolvido por mim que incorpora um conjunto LED / LDR para atingir o mesmo .

No arranjo eletromecânico mostrado na figura acima, podemos ver os seguintes componentes integrados:
Uma pequena engrenagem conectada com um mecanismo de parafuso.
A cabeça do parafuso tem uma superfície refletora de esteira branca
Um conjunto LED / LDR posicionado na frente da cabeça do parafuso.
Como funciona o mecanismo proposto.
A engrenagem mostrada na figura acima deve ser travada com outra engrenagem com uma relação que pode ser 10 vezes maior do que esta.
A engrenagem maior precisa ser configurada com o mecanismo do pedal de forma que ele inicie um movimento rotacional em resposta ao pressionamento do pedal.
A resposta de rotação das engrenagens, por sua vez, produzirá um movimento para a frente da cabeça do parafuso através da câmara onde o conjunto LED / LDR está localizado.
O processo fará com que uma quantidade proporcionalmente variável de luz refletida do LED seja recebida pelo LDR.
Estes dados variáveis (na forma de uma resistência variável) correspondentes à depressão do pedal podem então ser alimentados a um circuito processador de sinal para reforçar o controle de velocidade pretendido do veículo específico.
No próxima postagem aprenderemos o estágio do processador de sinal usando a técnica PWM.
No seção acima aprendemos sobre um conjunto de conversor eletromecânico simples para transformar a ação do pedal em um sinal elétrico que varia proporcionalmente.
Convertendo Ação do Pedal para PWM
Agora vamos estudar a implementação de um circuito que nos permitirá converter o sinal elétrico do pedal em um sinal PWM de variação correspondente para o controle de velocidade do motor pretendido do veículo.

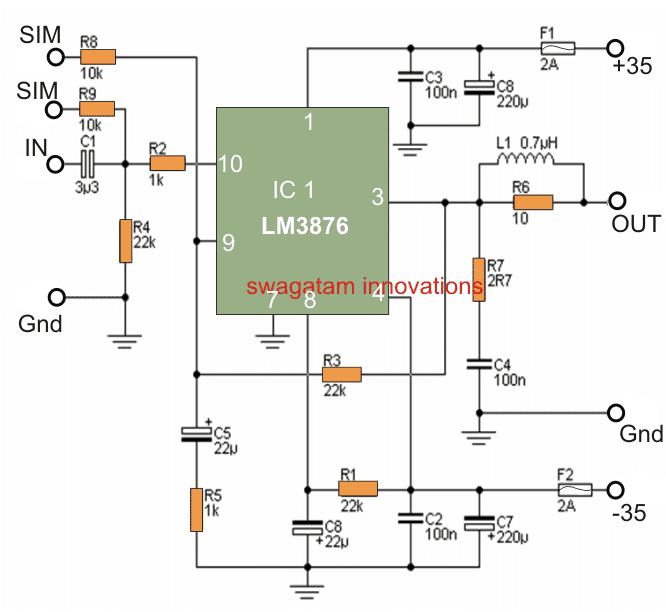
Referindo-se ao diagrama de circuito acima, podemos avaliar a operação do circuito com a ajuda dos seguintes pontos:
IC1 é configurado como um gerador de pulso de 80 Hz com tempo máximo de LIGADO e tempo mínimo de DESLIGADO como ciclo de trabalho
IC2 é montado como um comparador que primeiro converte o pulso de 80 Hz acima aplicado em seu pino 2 com ondas triangulares geradas em seu pino 6 e compara as ondas triangulares com a tensão modulante disponível em seu pino 5.
A tensão de modulação do pino 5 é derivada de um emissor BJT BC547 que é configurado como um coletor comum com sua base conectada com as entradas LDR obtidas a partir das ações do pedal.
As resistências variáveis em resposta à pressão do pedal são comparadas com a configuração predefinida de 100K e uma magnitude proporcional de voltagem é desenvolvida na base do transistor que converte a entrada de baixa corrente em um sinal de alta corrente equivalente sobre o pino 5 de IC2.
Este nível de potencial instantâneo é aceito e processado pelo IC2 gerando magnitude proporcional de sinais PWM para o mosfet e o motor conectado.
A velocidade do motor é então controlada e variada de acordo com os PWMs flutuantes em resposta às pressões do pedal do veículo.
Os procedimentos acima convertem efetivamente as ações do pedal em operações controladas do motor do veículo e de sua velocidade.
Como configurar o circuito.
É muito fácil.
- Pressione o pedal até o seu ponto máximo de forma que a cabeça do parafuso alcance a posição mais próxima possível na frente do conjunto LED / LDR.
- Em seguida, ajuste a predefinição de 100k até que o pino 3 do IC2 comece a gerar PWMs com largura máxima, isso pode ser confirmado medindo a tensão no pino 3 para ser o mais próximo possível da tensão de alimentação do circuito, ou seja, 5V.
- Feito isso, o procedimento de configuração pode ser considerado concluído.
- Os resultados agora podem ser verificados pressionando o pedal em diferentes níveis e verificando se a velocidade do motor varia de maneira idêntica.
Anterior: Circuito de Medidor Simples ESR Próximo: Como construir um circuito de iluminação crescente