Com o desenvolvimento de tecnologias, especialmente em tecnologia robótica, os robôs são predominantes em muitas das aplicações. Alguns deles são de tipo e áreas perigosas. Os aplicativos militares e de campo de batalha estão aumentando o uso de robôs em algumas tarefas cruciais e complicadas. Em um de meus artigos, descrevi o uso de robôs como espiões em operações militares. Agora, e se houver necessidade de defesa de o veículo robótico ou um ataque do robô? É aí que surge a necessidade de um robô integrado com um mecanismo de ataque. Um exemplo é o veículo robótico com uma arma LASER.

Veículo robótico controlado por RF com arranjo de feixe de laser
Esse robô é usado basicamente em operações militares e também pela polícia de trânsito para detectar a velocidade de veículos em movimento.
Antes de entrar em detalhes sobre robôs com armas laser, vamos ter um rápido entendimento do LASER como uma arma.
Um feixe de LASER (amplificação de luz por emissão de estimulação) é uma luz unidirecional fortemente focada, ao contrário de uma lâmpada simples. Consiste em depressões e cristas sincronizadas, ou seja, as ondas não interferem umas nas outras. Isso produz uma luz fortemente focalizada de muito alta potência da ordem de 1000 a 1 milhão de vezes maior do que uma lâmpada típica. É um dispositivo que controla a emissão e absorção dos fótons bombeando uma quantidade suficiente de energia. Neste, a fonte de fótons é amplificada em um feixe de luz. O comprimento de onda desses lasers é variado em diferentes espectros, como visível, infravermelho e ultravioleta.
O princípio por trás do LASER gira em torno de três coisas: absorção, emissão espontânea e emissão estimulada. Uma quantidade adequada de energia do fóton interage com o átomo, fazendo com que o átomo salte do estado de menor energia para o estado de maior energia. Este átomo retorna ao estado de menor energia ao emitir um fóton chamado emissão espontânea. Na emissão estimulada está a liberação de energia do átomo por meios artificiais. então o fóton interage com o átomo excitado, tem a mesma energia e polarização que o fóton incidente.
Agora vamos dar uma olhada nas partes de hardware do robô
- Base: A base de tal robô pode ser qualquer corpo cúbico com rodas acopladas para seu movimento.
- Motor DC: O robô consiste em dois motores CC acionados pelos drivers do motor e fornece o movimento necessário para o robô.
- Unidade de controle: O movimento do robô é controlado usando um módulo de comunicação RF. O transmissor consiste em botões, microcontroladores, um decodificador e um transmissor de RF, enquanto a unidade receptora embutida no robô consiste em um codificador e um módulo receptor de RF para controlar o movimento robótico .
- Uma arma LASER: Uma arma LASER é montada no robô que executa a tarefa principal do robô.
Uma espiada no funcionamento do robô
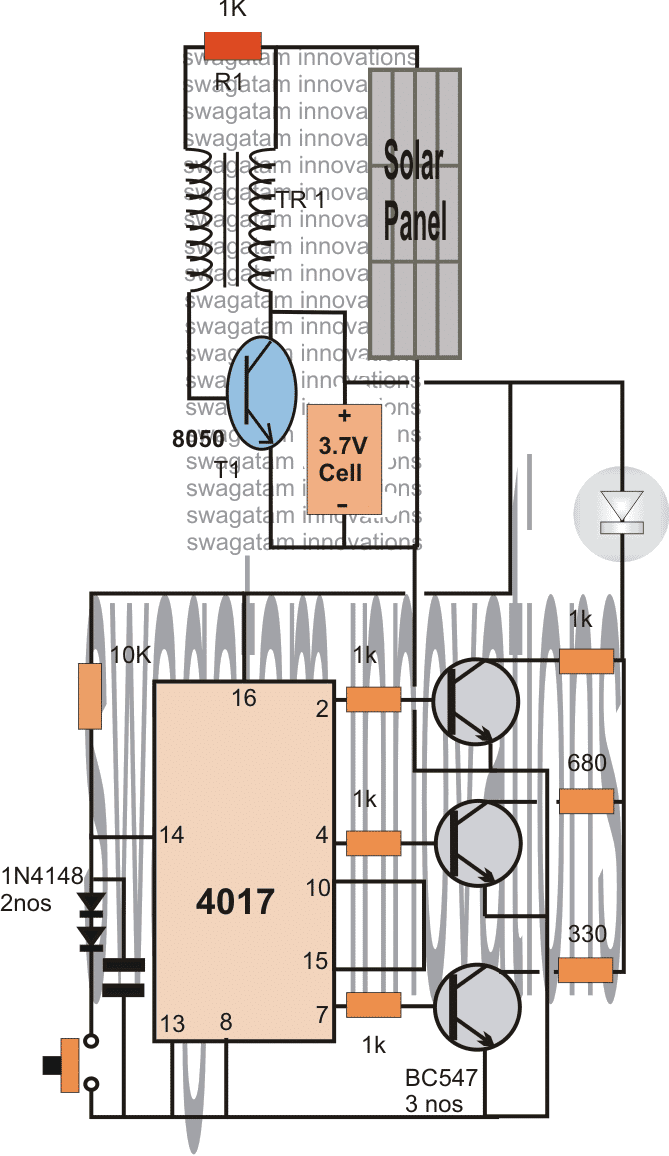
O robô, enquanto se move na direção necessária, dispara um forte feixe de luz da arma LASER que pode prejudicar o alvo ou apenas produzir um ponto para detectar o alvo. O LASER precisa ser acionado por algumas fontes de energia. Em um projeto de protótipo simples usando uma caneta LASER básica, o dispositivo é acionado por um transistor que atua como um interruptor. O transistor recebe o sinal lógico baixo do microcontrolador e fica desligado, fazendo com que o módulo LASER seja conectado diretamente na fonte de alimentação de 5 V.

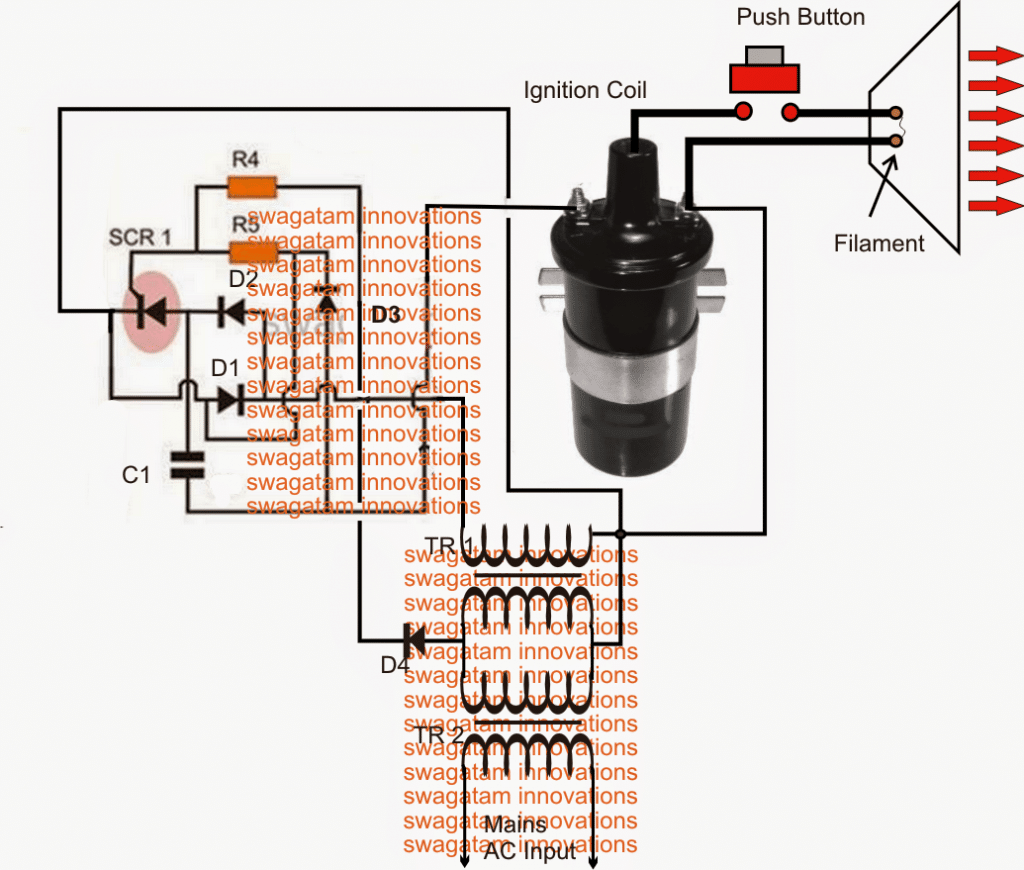
Pistola laser acionada por transistor funcionando como um inversor
Controlando o Robô
Para controlar o movimento do robô, a operação dos motores precisa ser controlada. Isso pode ser feito usando uma operação controlada por RF dos drivers do motor. Os comandos são transmitidos usando um transmissor de RF em alguma unidade de distância de cerca de 200 metros e recebidos pelo receptor de RF para acionar os motores.
A unidade transmissora consiste em vários botões que atuam como interruptores de comando para mover o robô em qualquer direção desejada. Os botões de pressão têm interface com o microcontrolador, que é programado para enviar dados em paralelo com base na entrada do botão de pressão, para o codificador. O codificador converte esses dados paralelos para a forma serial e esses dados seriais são transmitidos usando o módulo transmissor de RF por meio de uma antena.

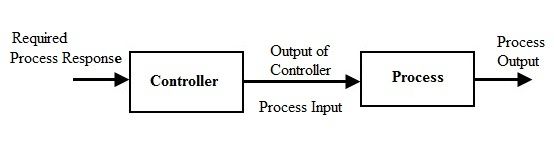
Diagrama de blocos mostrando a seção do transmissor
A unidade receptora consiste em um módulo receptor RF que recebe o sinal modulado e o demodula. O decodificador recebe o sinal demodulado na forma serial e converte-o na forma paralela. O microcontrolador recebe os sinais e controla o driver do motor de acordo. O driver do motor usado no LM293D, que pode controlar 2 motores por vez.

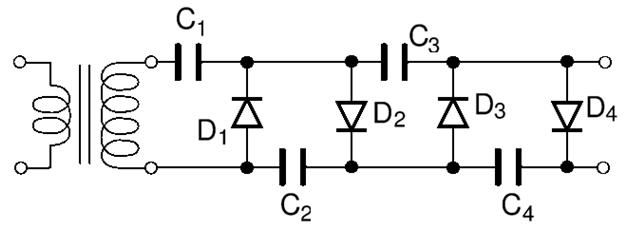
Diagrama de bloco mostrando a seção do receptor
Assim, usando comunicação RF, podemos controlar o robô.
Nas descrições acima, dei uma breve ideia sobre um protótipo simples de um veículo robótico com um feixe de LASER. Em aplicações da vida real, normalmente sistemas de comunicação de longo alcance como GSM ou DTMF são usados para controlar o robô de locais remotos.
3 aplicações de veículos robóticos com arma laser:
- Detecção de Alvo : O veículo robótico pode usar o feixe LASER para causar um ponto no alvo, de forma que seja facilmente visível e possa ser direcionado. Um exemplo é o LASER Air Borne.
- Destruição de Alvo : Um forte Raio Laser da ordem de frequência de 95 GHz pode causar uma sensação de queimação no corpo humano ao penetrar na pele em 1/64ºde uma polegada e a energia do feixe pode aquecer as moléculas de água no corpo. Um exemplo é o Active Denial System desenvolvido pelos EUA.
- Localizador de alcance alvo e detecção de velocidade : O feixe LASER do veículo robótico pode ser usado para encontrar o alcance do alvo pelo princípio de reflexão da luz LASER e também a velocidade do alvo pode ser calculada uma vez que possamos obter o alcance.
Portanto, agora temos uma breve ideia sobre os robôs usados um detector e destruidor de alvo. Tem alguma utilidade para o público normal, exceto apenas para os militares? Pense e responda.