O post explica um circuito de luz de freio inovador usando detecção de velocidade do veículo que poderia ser uma motocicleta. O circuito implementa um interruptor avançado de luz de freio LIGADO, garantindo uma experiência de pilotagem muito mais segura para o usuário. A ideia foi solicitada pelo Sr. Rayan.
Objetivos e requisitos do circuito
- Eu tenho uma ideia, geralmente as luzes de freio de uma motocicleta só acendem quando os freios são acionados. Mas normalmente a velocidade da motocicleta é reduzida mudando as marchas. Você pode fazer um circuito de forma que as luzes de freio se acendam dependendo da velocidade reduzida no motor, mesmo com os freios acionados ou não.
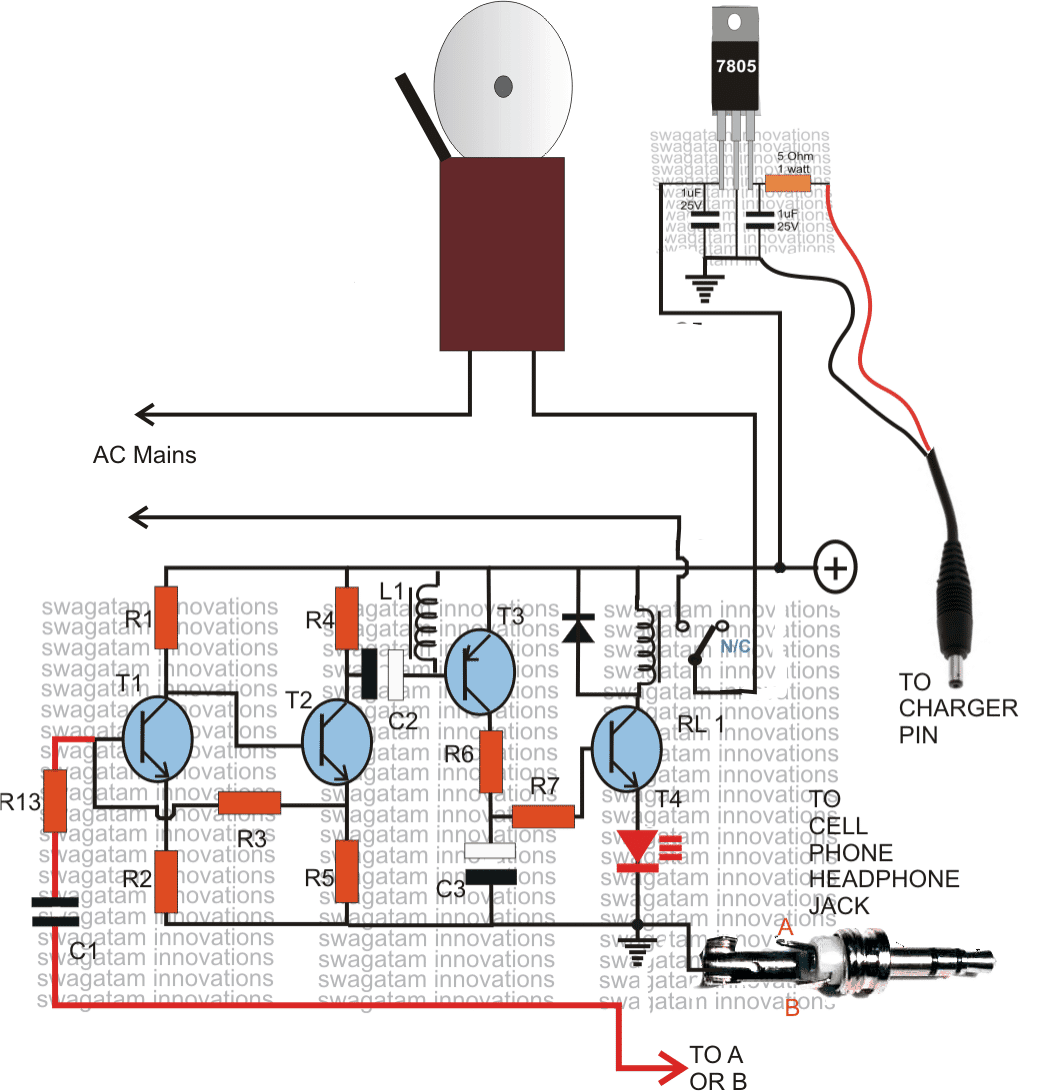
- Na motocicleta .. Quero instalar um farol automático. Farol automático é aquele que acende quando o motor dá a partida e apaga quando o motor é desligado.
- E também você pode fazer circuito que tem draga automática de dimmer junto com faróis automáticos .. !! E também no mesmo circuito. Devo também ter um ponto de carregamento para carregar um telefone celular da bateria.
- E quero fazer um circuito em que as marchas trocadas na motocicleta sejam mostradas em uma tela ..! Da mesma forma que o indicador esquerdo está ligado, ele mostra que o indicador foi feito na tela.
- Da mesma forma, quando mudo as marchas, ele também deve mostrar em qual marcha estou dirigindo minha motocicleta.

O design
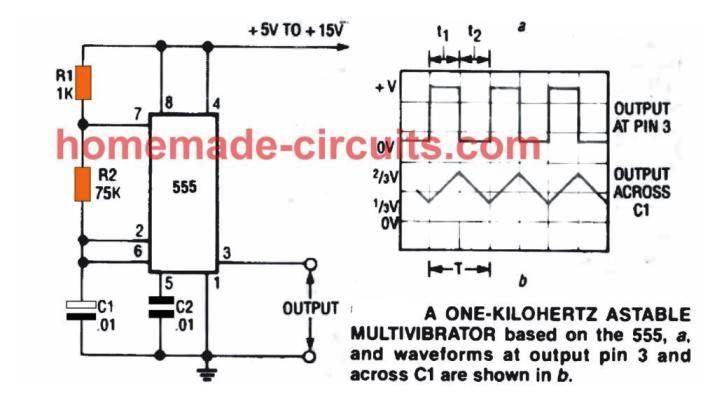
Como mostrado na figura acima, o circuito de luz de freio proposto usando detecção de velocidade consiste em dois estágios principais, viz, o estágio de circuito de tacômetro IC 555 e o estágio de circuito de driver de LED de modo de ponto IC LM3915 subsequente.
O estágio do circuito do tacômetro é configurado como um integrador para processar os sinais do relógio do pick up da motocicleta.
A bobina de captação traduz a velocidade do motor em uma taxa de clock (Hz) correspondente, que é aplicada na base do BC547 associado ao circuito IC 555.
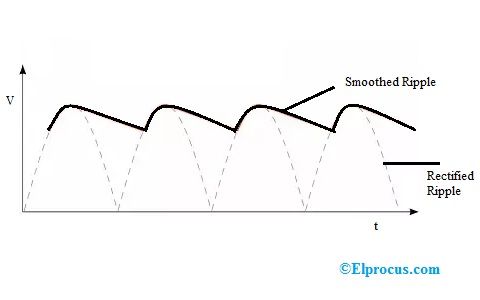
Esses relógios são processados e convertidos em uma voltagem que varia exponencialmente através da rede RC conectada ao pino # 3 do IC 555.
A saída integrada acima é alimentada para a entrada de detecção do estágio de driver de modo de ponto de LED LM3915 indicado.
Os 10 LEDs conectados através dos pinos de saída do LM3915 respondem aos níveis de tensão exponencialmente crescentes e decrescentes da saída IC 555 e, de forma correspondente, produzem um salto lógico sequencialmente baixo através desses LEDs, que acendem na sequência idêntica da esquerda para a direita, e vice-versa.
Como o IC está configurado no modo de ponto, apenas um LED acende por vez, desligando os anteriores conforme a sequência avança ou dança ao longo da linha.
Este movimento para cima / para baixo dos LEDs representa a velocidade do veículo (ou o nível de marcha) e este resultado é explorado pelo par de transistores para ligar as luzes de freio através detecção de velocidade .
Como funciona
A ideia aqui é detectar a velocidade e ligar as luzes de freio apenas quando for detectado que a velocidade está diminuindo relativamente mais rápido, e ignorando as transições mais lentas ou a mudança de marcha atrasada.
Isso é importante para garantir que as luzes de freio não acendam nas mudanças normais de marcha mais baixa, destinadas apenas a reduzir a velocidade, em vez de parar o veículo em algum destino próximo.
Isso é implementado pelo uso inteligente das duas pinagens (selecionadas arbitrariamente) e os dois respectivos transistores BC557 conectados com as pinagens relevantes do IC LM3915.
A predefinição no pino # 5 do IC é ajustada de modo que em velocidades e níveis de engrenagem relativamente mais altos, o último LED na sequência no pino # 10 é LIGADO (ativado), que liga correspondentemente o transistor BC557 do lado direito conectado.
Durante este tempo, o lado esquerdo BC557 mostrado conectado no pino # 15 é mantido DESLIGADO (uma vez que apenas o pino # 10 está LIGADO, o resto está DESLIGADO), portanto, o driver de LED usando o TIP122 também é mantido desligado e, consequentemente, as luzes de freio também estão desligados.
Agora, no caso de o veículo que poderia ser uma motocicleta ter que ser parado pelo motociclista e, portanto, sua velocidade reduzida de forma relativamente rápida, resulta na saída do LM3915 sequenciando para trás proporcionalmente e tocando no pino # 15.
Uma vez que se pode esperar que o sequenciamento acima aconteça em uma taxa mais rápida, o BC557 no pino # 10 é mantido ligado por sua rede RC de base, mesmo enquanto seu acionador de base se moveu e sequenciou no pino # 15.
Neste instante, pode-se esperar que o BC557 seja LIGADO, e o driver de LED junto com as luzes de freio também estão LIGADOS .... as luzes de freio agora acendem intensamente por algum tempo até o pino de tempo # 10 BC557 é capaz de reter seu nível de carga do capacitor de base até o ponto de comutação ideal.
Anterior: IC 555 Pinouts, Astable, Monostable, Biestable Circuits com Fórmulas Exploradas Próximo: LM35 Pinagem, Folha de Dados, Circuito de Aplicação

![Luzes de controle, ventilador, usando o controle remoto da TV [diagrama de circuito completo]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)