Os ICs da série TSOP17XX são dispositivos sensores infravermelhos especiais construídos para responder a uma faixa específica de frequências infravermelhas e convertê-la em uma saída elétrica pulsada. Assim, ele apresenta uma imunidade infalível a outras formas de sinais de infravermelho.
Devido a este centro específico ou frequência operacional de passagem de banda de um TSOP17XX, torna-se difícil usar esses sensores para projetar circuitos de controle remoto baseados em frequência desejada ou personalizada.
Nesta postagem, tentaremos descobrir uma ideia para permitir que esses sensores funcionem com qualquer frequência única desejada, de modo que o circuito possa ser totalmente à prova de falhas.
Princípio Básico de Funcionamento dos Módulos Sensor TSOP17XX
Se nos referirmos ao folha de dados do sensor TSOP17XX IR descobrimos que o IC tem algumas diretrizes operacionais críticas para garantir o funcionamento correto e ideal do sensor em resposta a um sinal IR.
Para permitir o funcionamento correto do sensor, o sinal de IR deve ser oscilado no valor da frequência central de passagem de banda dos dispositivos e modulado em bursts de 10 a 70 ciclos, com um certo gap após cada ciclo, conforme imagem a seguir.

A imagem acima mostra claramente que o feixe IR do Tx deve ser pulsado com a frequência central do IC, que geralmente está entre 30kHz e 39kHx, e modulado com bursts de intervalo de 10ms.
O TSOP responde a este sinal de frequência central e dispara LIGADO, produzindo uma forma de onda replicada em sua saída, em que 38 kHz são nivelados em rajadas de pulsos de onda quadrada comum.
Esta forma de onda operacional complexa garante maior imunidade contra muitas frequências espúrias que podem estar presentes na atmosfera emanadas de lâmpadas, como lâmpadas fluorescentes compactas, lâmpadas fluorescentes, etc.
Desvantagem dos Sensores TSOP17XX
Embora o sensor apresente uma operação infalível devido a esse complexo padrão de recepção de sinal, a frequência central fixa para sensores TSOP restringe seu uso apenas a essa faixa de frequência específica, tornando impossível criar circuitos de controle remoto IR personalizados exclusivos usando esses chips.
Devido a esta desvantagem, um sistema de controle remoto baseado em TSOP pode ser operado normalmente usando qualquer TV comum ou aparelho de controle remoto de DVD, e usando qualquer um dos botões na unidade de controle.
No entanto, em eletrônica há sempre uma solução alternativa para tudo, e para esses sensores também podemos criar um design que nos permitirá usar o IC com uma frequência única selecionada de nossa escolha, de modo que o receptor seja comutado apenas por um par Tx compatível específico, e não com qualquer monofone remoto comum disponível.
Projetando um circuito de controle remoto TSOP baseado em frequência exclusivo
A partir da discussão acima, entendemos que os sensores baseados em TSOP requerem rajadas de frequência de 38 kHz, ou a frequência central especificada para operar, o que indica que o sinal envolve duas frequências nas quais a frequência central é constante, mas a frequência de rajada é variável e não crítica .
A ideia é capturar essa frequência de burst a nosso favor e usar um filtro que reconheça essa frequência para acionar a saída.
O circuito do filtro pode ser facilmente projetado usando um Circuito decodificador de tom LM567 , e usá-lo para decodificar uma frequência de burst específica da saída do sensor TSOP no lado do receptor.
O conceito básico pode ser testemunhado no diagrama a seguir.
Diagrama de circuito 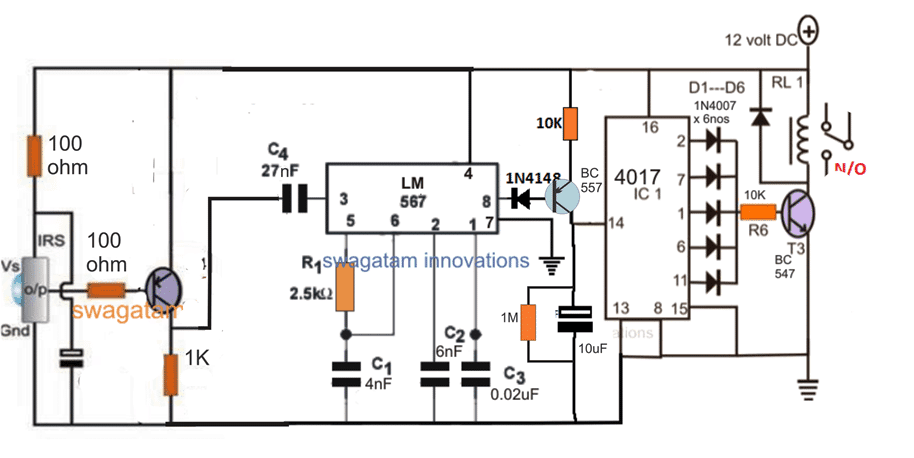

Operação de Circuito
Referindo-se ao diagrama de circuito acima para implementar o TSOP17XX com frequências personalizadas, vemos que ele consiste em 3 estágios básicos:
- o estágio do sensor TSOP17XX
- o estágio detector de frequência baseado em LM567
- e o flip-flop baseado em IC 4017 ou estágio de circuito biestável.
O estágio TSOP17XX é configurado em seu modo padrão, que pega a frequência modulada de 38kHz da unidade Tx do transmissor e cria uma onda quadrada pulsada conforme indicado no primeiro diagrama.
Pode-se esperar que esta saída do TSOP carregue a frequência de burst na qual estamos interessados. Isso pode ser definido para 1kHz, 2kHz ou qualquer coisa abaixo de 10kHz.
Agora queremos que nosso estágio de decodificador de tom LM567 detecte esta frequência modulada corretamente, portanto, devemos nos certificar de que o R1 / C1 do estágio LM567 é calculado de forma que o oscilador interno trave na mesma frequência correspondendo às rajadas de frequência de modulação da saída TSOP .
Uma vez que esses parâmetros são definidos, podemos esperar que o LM567 trave LIGADO assim que a frequência selecionada for detectada na saída do TSOP78XX, enquanto qualquer outra frequência de modulação é simplesmente rejeitada.
Ao detectar uma frequência atribuída corretamente, a saída LM567 gera um sinal de disparo baixo correspondente em seu pino # 8, ativando o pino de entrada flip-flop baseado em IC 4017 conectado # 14 através do PNP.
Desta forma, somos capazes de atribuir diferentes frequências exclusivas, garantindo que o acionamento do receptor seja ativado apenas por meio do aparelho Tx correspondente e não com qualquer unidade de controle remoto de TV comum.
Fazendo o circuito do transmissor personalizado (Tx)
Na discussão acima, aprendemos como um sensor TSOP17XX pode ser operado com uma frequência personalizada usando um estágio de detector de frequência, no entanto, isso também significa que o transmissor (Tx) também precisará ser construído exclusivamente para gerar os sinais IR personalizados.
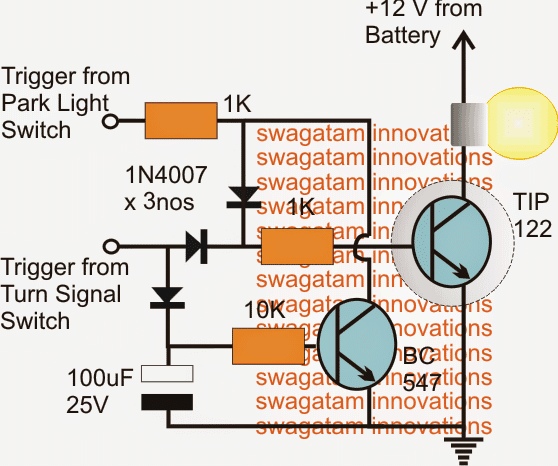
A figura a seguir mostra como isso pode ser implementado usando um único IC 4049 e alguns elementos passivos:

As 6 portas são todas do IC 4049, R3 pode ter 10K resistores enquanto os presets podem ser 100K. Os bonés C1 precisarão ser selecionados com alguma experimentação prática. O diodo pode ser um 1N4148, os resistores restantes podem ser selecionados como 2K2.
Como pode ser visto, o par superior de portas juntamente com R3, preset e C1 é configurado como um oscilador de funcionamento livre, a seção inferior também tem um estágio idêntico.
A seção superior é alimentada para uma porta de buffer intermediária, cuja saída é finalmente conectada com o fotodiodo IR do transmissor.
Toda a seção é configurada para gerar a frequência central básica para a compatibilidade TSOP17XX, que pode variar de 32kHz a 38kHz, dependendo das especificações do sensor selecionado.
O oscilador inferior é suposto ser um estágio de modulação de baixa frequência que pode ser visto integrado com a seção superior através de um diodo. Esta baixa frequência muda a alta frequência superior para gerar as 'rajadas de 38 kHz' necessárias no diodo transmissor IR.
Esta baixa frequência torna-se realmente a nossa frequência única, ou a frequência de controle remoto personalizada pretendida que precisa ser combinada com a frequência LM567 para que ambas as frequências 'apertem as mãos' durante a comunicação IR entre as unidades Tx e Rx.
A baixa frequência pode ser selecionada em qualquer lugar entre 1kHz a 10kHz, e esta faixa selecionada deve ser definida com precisão para o estágio LM567, ajustando apropriadamente seus valores R1 / C1.
Isso conclui nossa discussão sobre como modificar um circuito do sensor TSOP17XX para acomodar faixas de frequência especiais personalizadas ou faixas de frequência exclusivamente selecionadas para tornar o sistema de controle remoto absolutamente infalível e pessoal.
Se você tiver alguma dúvida quanto ao conceito, a caixa de comentários é toda sua!
Anterior: Introdução ao sensor de cores RGB TCS3200 Próximo: Circuito Detector de Cores com Código Arduino