
O termo Robô foi introduzido pela primeira vez por um dramaturgo tcheco Karel Capek no ano de 1920. A palavra robô também é usada para descrever um dispositivo mecânico inteligente. A robótica é um dos ramos da tecnologia e lida com projeto, criação, operações e aplicações de robôs . A palavra robótica deriva da palavra robô. Existem principalmente quatro tipos de robôs disponíveis no mercado hoje: tipo serial, tipo móvel, tipo paralelo e tipo ambulante. Os elementos dos robôs são manipuladores, efetores finais, garras, fonte de alimentação e controladores. Este artigo lista projetos de robótica baseados em microcontroladores para estudantes de engenharia.
O que é um robô?
Quando pensamos em um robô, a primeira coisa que vem à nossa mente é que é uma máquina que imita um ser humano. Mas, em termos reais, não existe uma definição padrão para um robô. No entanto, existem algumas características fundamentais que um robô deve ter - por exemplo: sensibilidade, movimento, energia e inteligência. Alguns robôs podem trabalhar sozinhos e executar determinadas tarefas, enquanto outros robôs precisam da intervenção e da ajuda de seres humanos. Os robôs são usados em muitas aplicações, como mídia, comunicação espacial e aplicações militares.
Os gastos com máquinas-ferramentas têm crescido aos trancos e barrancos nos setores de eletrônicos e automóveis. De acordo com pesquisas do setor, a Índia gastou quase milhares de crores em máquinas-ferramentas. Para atender à demanda de sistemas robóticos de baixo custo, robôs baseados em Bangalore estão ativos e uma empresa lançou dois de seus robóticos de baixo custo: Artrimus e G4. Artimus é um braço robótico de baixo custo e G4 é um Robô Gantry de alta velocidade.

Projetos de robótica usando microcontrolador
O que são robôs industriais?
Robôs industriais, conforme definido pela Organização Internacional (ISO) para padronização, são controlados repetidamente, manipuladores reprogramáveis e multiuso e programáveis em muitos eixos. Esses robôs são projetados para mover peças, materiais e ferramentas e para executar uma variedade de tarefas de manufatura e produção.
Os robôs industriais modernos são verdadeiras sensações da engenharia. Esses robôs podem carregar uma carga de cerca de cem libras e movê-la muito rapidamente com repetibilidade. Esses robôs são programáveis em muitas aplicações e são usados em indústrias automotivas para aplicações de montagem, soldagem a arco e manuseio de materiais.

Robôs Industriais
Projetos de robótica baseados em microcontroladores para estudantes de engenharia
A lista a seguir fornece projetos de robótica baseados em microcontroladores econômicos, o que é útil para os alunos. Portanto, os projetos de robótica baseados em microcontroladores para estudantes de engenharia incluem o seguinte.
Robô de telepresença virtual
Este projeto é usado para projetar um robô de telepresença. Neste robô, uma câmera é disposta em uma área remota para capturar os arredores em tipo visual com a ajuda de Raspberry Pi. Esses recursos visuais são mostrados na realidade virtual do fone de ouvido do usuário.
Um recurso adicional permite que a câmera atrapalhe os movimentos da cabeça do usuário para dar uma experiência imediata ao usuário, pois se ele estiver lá onde quer que esteja colocado o robô de um robô de telepresença virtual. Este tipo de robô também vai de alguma forma utilizando um aplicativo instalado dentro do Smartphone do usuário.
Robô de Futebol
Este projeto é usado para projetar um robô de futebol. Este robô pode se mover em diferentes direções, como para a frente, para a direita, para trás e para a esquerda usando um aplicativo Android. O movimento de velocidade do robô pode ser controlado através do ângulo de rotação do telefone. Assim que o smartphone for sacudido, este robô chutará uma bola.
Robô para detecção de metal
Este projeto implementa um robô usando um microcontrolador que é usado para detectar metais na pista em frente a ele. Este tipo de robô é muito útil na detecção de minas terrestres, bem como metais no solo. Este projeto usa tecnologia RF para controlar o robô.
Robô para detecção humana
Existem diferentes robôs de detecção humana disponíveis com base no aplicativo. Mas durante os terremotos, para uma equipe de resgate, é muito difícil detectar os humanos sob as construções, pois isso leva muito tempo. Para superar esse problema nessas situações, o robô de detecção humana é implementado para detectar o tempo inadequado do humano usando um sensor de detecção humana. Este robô de detecção humana pode ser operado manualmente por meio da tecnologia RF usando um PC
Dedo indicador tátil controlado por sensores MEMS
O toque tátil é usado para sentir o mundo segurando ferramentas. Este projeto implementa um robô detectado por dedo indicador usado por pessoas com deficiência para que possam seguir a direção do dedo indicador.
O caminho do robô pode ser contínuo, caso contrário, ponto a ponto. O sensor usado neste robô detecta principalmente a direção do dedo indicador e gera a saída. Esta saída pode ser transmitida usando o transmissor RF em direção à unidade receptora RF.
No receptor RF, o receptor recebe o sinal para comandar o microcontrolador para que o robô possa se mover em uma direção específica. Este sistema usa tecnologia RF, sensor MEMS e microcontrolador. O robô obtém os comandos usando o sensor MEMS. Na seção do transmissor, este sensor pode ser colocado no dedo indicador.
Projeto de veículo não tripulado usando microcontrolador
Este projeto implementa um veículo não tripulado com a ajuda de um microcontrolador e uma rede GSM. Este projeto substitui o controle remoto de RF usando a rede GSM, pois apresenta diferentes desvantagens, como a faixa de frequência é limitada e o controle limitado.
Implementação de Robô de Levantamento Terrestre
Este projeto projeta um robô usando um microcontrolador, ou seja, um robô de levantamento terrestre. Este robô foi especialmente projetado para calcular a região do terreno e dividi-la em diferentes parcelas. Este projeto inclui duas partes como o robô de pesquisa e módulo de medição para a área. O controle deste robô pode ser feito através do módulo ZigBee para que o robô se mova por toda a trama.
O cálculo da distância percorrida do robô pode ser feito usando o conceito de cronômetro. Este valor de distância pode ser enviado ao PC. Neste sistema, a segunda parte envolve o módulo de medição de região. Este módulo pode ser projetado com linguagem C incorporada para permitir ao usuário decidir de forma eficiente a região do gráfico.
Robô para pintura de parede
O conceito principal deste projeto é implementar um robô de pintura de paredes. Este robô auxilia na obtenção de equipamentos de pintura de baixo custo. A principal razão para projetar este robô é que os produtos químicos na pintura da parede podem causar problemas de saúde aos pintores humanos, como infecções nos olhos e na garganta.
A pintura à mão consome muito tempo devido ao trabalho repetido. Uma vez que os robôs e os trabalhadores da construção estejam devidamente incluídos nas tarefas de construção, todo o procedimento de construção pode ser gerenciado de uma maneira melhor, reduzindo a mão de obra. Além disso, ele resolveria a maioria dos problemas relacionados com a segurança sempre que várias atividades ocorressem ao mesmo tempo.
Robô de escalada de parede
A principal função deste robô é projetar e desenvolver um robô para escalar paredes para limpar uma única janela grande. Este robô gruda na superfície do vidro usando uma ventosa de vácuo. Este robô limpa a janela usando um limpador que está conectado ao robô na parte frontal. Assim que a janela estiver limpa, o robô interromperá a limpeza de acordo com as instruções fornecidas pelo microcontrolador.
Para a adesão do robô ao exterior, existem diferentes métodos disponíveis, como o uso de força magnética, microespinha, etc. No entanto, aqui desenvolvemos Elecrochuks neste sistema para obter a adesão do robô. As dimensões deste robô são cerca de 690 mm vezes, enquanto seu peso é cerca de 3 kg abaixo.
4 em 1 robô usando microcontrolador
Este projeto implementa um robô quatro em um baseado em microcontrolador que funciona em quatro modos, como detecção de borda, seguimento de linha, localização e detecção de obstáculos. Este projeto pode ser construído com microcontrolador ATMEGA168 para atingir o objetivo usando os interruptores, sensores e LED.
Ferramenta movida a energia solar usando microcontrolador e braço robótico
Os negócios de robôs por meio de máquinas automatizadas que podem tomar o lugar de humanos implicam apenas na aparência de humanos. O braço de um robô é um tipo de dispositivo mecânico geralmente programado com as mesmas funções de um braço humano. Sabemos que a energia solar é uma luz brilhante, bem como o calor gerado pelo sol. O sistema proposto é usado para projetar um robô que pode ser alimentado por energia solar através dos braços de um robô para pegar e posicionar um objeto.
No sistema proposto, o veículo robótico movido a energia solar foi projetado principalmente. Isso é usado principalmente para aumentar a potência dos veículos que usam energia solar. Neste projeto, o braço robótico é projetado para lidar com o veículo para pegar e colocar um objeto. O carregamento dos veículos pode ser feito por meio de dois métodos, como o uso da fonte de alimentação direta e outro é o rastreamento da energia solar. Portanto, toda a energia solar pode ser utilizada pelo robô para que a operação necessária possa ser realizada.
Análise e controle de robô móvel para inspeção de tubulação
Este projeto projeta um robô que é usado para a inspeção de dutos. Este robô pode ser projetado por meio de sensores. Neste projeto, a análise da aceleração e da velocidade do método de quatro barras é utilizada para controlar o robô. Este robô usa o micro-controle 8051 que inclui duas seções como o transmissor e o receptor.
O transmissor inclui quatro interruptores para fornecer quatro ordens, enquanto o receptor é conectado ao GSM para operar o robô móvel, uma vez que recebe o comando, ele envia a mensagem assim que o robô detecta qualquer obstáculo. No receptor, inclui um sensor IR que funciona através do GSM para detectar um obstáculo. O GSM ajudará a projetar recursos interativos, de forma que o tempo necessário para encontrar o problema seja reduzido.
Sistema de controle para cadeira de rodas elétrica usando olhos
Este projeto visa implementar um sistema de controle de uma cadeira de rodas elétrica com olhos. O controle desse sistema proposto pode ser feito apenas através dos olhos. Assim, as pessoas com deficiência física podem controlar sozinhas uma cadeira de rodas elétrica. Ao usar este projeto, o sistema proposto é forte contra os fatores de potência mencionados acima. Além disso, está estabelecido que este projeto pode ser controlado por olhos humanos com segurança e precisão.
Servindo Robô por RFID
Este projeto projeta um robô de serviço com a ajuda de RFID. Este tipo de robô é usado para aumentar a eficiência no atendimento de alimentos aos clientes em restaurantes, hotéis, reduzindo o tempo de espera. Neste projeto, a operação necessária pode ser realizada com o auxílio de um microcontrolador PIC e também com a tecnologia RFID.
Land Rover operado por celular
Este projeto implementa um robô land rover onde o controle do robô pode ser feito em três fases diferentes como percepção, ação e processamento. Em geral, os preceptores nada mais são do que sensores dispostos no robô e o processamento pode ser feito por meio do microcontrolador. A tarefa pode ser realizada com a ajuda de motores ou atuadores.
O robô neste projeto pode ser controlado por telefone fazendo uma chamada para o telefone que está conectado ao veículo robótico. O tom do celular que corresponde a um botão pode ser ouvido no final do processamento. O robô land rover reconhece este tom DTMF usando o telefone empilhado dentro do robô
Robô controlado por Bluetooth
Este projeto implementa um robô controlado por Bluetooth. Esses robôs podem ser operados por meio de sinais que são transmitidos de um telefone Android junto com a comunicação Bluetooth. Os principais componentes usados neste projeto são microcontrolador, motor DC e módulo Bluetooth. A conexão entre o sistema e também o usuário pode ser estabelecida por meio do dispositivo Bluetooth sempre que um microcontrolador for usado para processamento de sinal. As aplicações desses robôs incluem veículos remotos para missões não tripuladas.
Robô controlado por Wi-Fi e microcontrolador
Hoje em dia, o WiFi tornou-se uma parte essencial do nosso dia a dia e os diferentes dispositivos que estão ligados à Internet irão aumentar devido ao desenvolvimento da tecnologia. Neste projeto, o processo de integração pode ser feito tanto por meio de um sistema embarcado quanto pela internet.
Este robô pode ser operado através de um site ou computador com a ajuda de Wi-Fi como o módulo de comunicação. Este módulo deve ser usado para configurar uma conexão entre o usuário e o robô. Os componentes essenciais usados para construir este projeto são microcontroladores, módulos Wi-Fi como ESP8266 e motores DC.
Robô coletor de lixo de água usando energia solar
Este projeto implementa um robô inovador para coletar lixo de água usando energia solar. A principal intenção deste projeto é limpar o lixo que pode ser coletado na superfície dos corpos d'água. Este projeto auxilia na limpeza da água para que a poluição seja reduzida.
Este projeto pode ser controlado através de um controle remoto RC. Este projeto usa bombas DC para fornecer o controle de direção e arranjo do servo motor para a navegação. Aqui, dois painéis solares são implementados para tornar o robô autossustentável na água. Esses painéis auxiliam no carregamento da bateria e a coleta de lixo pode ser feita por meio de um medidor de fio.
Vigilância da Vida Selvagem usando RF Robot
Este projeto projeta um robô para vigilância de fauna utilizando RF. Ao usar este projeto, o operador não precisa se aproximar dos animais selvagens para fazer a filmagem de perto. Aqui, o robô é usado para observar a vida selvagem dos animais usando o sistema de visão noturna usando uma câmera de visão noturna no robô. Este robô pode ser controlado sem fio usando um remoto RF. O vídeo gravado pode ser armazenado no PC para visualização dos animais.
Este sistema usa uma unidade de microcontrolador 8051 para receber sinais do transmissor RF para um processo posterior. Esses sinais podem ser transmitidos ao receptor RF para que o microcontrolador processe esses dados para acionar os motores. Para que os veículos robôs possam ser operados. Uma vez que o microcontrolador recebe o sinal para mudar a direção da câmera, ele encaminha para o motor para atingir o ângulo preferido da câmera. Portanto, a observação da vida selvagem pode ser feita por meio de um robô através de uma câmera de visão noturna para obter uma visão mais próxima dos animais por meio de RF remoto.
Algumas idéias de projetos de robótica com base em microcontroladores incluem o seguinte.
- Braço Robótico Pick-N- Place e o movimento controlado pelo Android sem fio
- Veículo robótico controlado por voz com reconhecimento de fala de longa distância
- Robô de espionagem de campo de guerra com câmera de visão noturna sem fio por aplicativos Android
- A decodificação do código Manchester controla a direção dos robôs pelo controle remoto da TV
- Detecção de fogo e robótica de controle
- Controle de braço robótico por meio de LAN da Internet para operação do paciente
- Robô de combate a incêndio operado remotamente por aplicativos Android
- Robô de espionagem de campo de guerra com câmera sem fio de visão noturna
- Veículo robótico de combate a incêndio
- Pick-N-Place com uma garra de pega macia
- Veículo robótico detector de metais
- Veículo robótico controlado por telefone celular
- Veículo Robótico Seguindo Linha Usando Microcontrolador
- Veículo robótico controlado por infravermelho
- Veículo robótico com controle remoto baseado em tela de toque para gerenciamento de lojas
- Trem do metrô para ônibus entre estações
- Veículo robótico para evitar obstáculos
- Veículo robótico controlado por RF com gerenciamento de feixe de laser
Projetos de robótica para estudantes de engenharia
Nos últimos anos, muitos estudantes de engenharia começaram a mostrar muito interesse em projetos robóticos em comparação com outros projetos. Robôs como pick-n-place, seguindo linha , wall track e projetos de robótica usando microcontroladores são projetos populares no nível acadêmico. A seguinte lista de projetos robóticos baseados em microcontroladores e projetos robóticos para estudantes de engenharia é bastante útil para os alunos. Além disso, existem alguns eletrônicos projetos de engenharia em aplicações robóticas.

Projetos de robótica para estudantes de engenharia
- Robô de detecção e alerta humano vivo
- Robô sem fio controlado por PC
- Robô com controle remoto baseado em RF com câmera de vídeo sem fio montada nele
- Robô Autônomo com Visão Artificial para Detecção de Obstáculos
- Purificador de ambiente sem fio pulverizando robô com vídeo-visão
- Escolha e coloque o robô simples
- Robô inteligente controlado por tela de toque
- Interface Homem-Robô usando reconhecimento de fala robusto
- Robô de detecção de fumaça e gás GLP com controle sem fio
- Robô multiuso sem fio controlado por PC
- Robô de reconhecimento de voz com uma indicação de sensor de fogo
- Robô de controle remoto com sensor de incêndio
- Braço robótico com interface com MCU / RF / IR / PC
- Robô Pulverizador Rápido
- Robô de rastreamento de painel solar
Projetos de robótica simples para iniciantes
Para iniciantes, é melhor ir para projetos robóticos simples para aprender conceitos e técnicas básicas que os desafiarão a enfrentar a robótica grande e complexa à medida que se acostumarem a praticá-la.

Projetos de robótica simples
- Robô controlado por celular usando GSM
- Robô Edge Avoider
- Robô Seguidor de Luz
- Uma linha simples seguindo o robô
- Robô seguidor de parede
- Robô de detecção de bomba
- Robô movido a energia solar da TRASH
- Robô Bêbado de Bolso
- Virbobot Barata Solar
- Blinky the LED Pet
- Robô intratável-modelo de papel
Projetos do robô Arduino
O Arduino é um microcontrolador de placa única e seu hardware consiste em uma placa de hardware de código aberto. Esta placa de hardware foi projetada usando um Atmel de 8 bits Microcontrolador AVR ou um ARM Atmel de 32 bits. O Arduino foi projetado para fornecer uma maneira fácil de programar objetos interativos. Aqui mencionamos uma lista de projetos de robótica baseados em microcontroladores, como um Arduino.

Projetos do robô Arduino
- Controle um braço robótico OWI com Arduino
- DFRobotshop Rover ou Arduino nas trilhas
- Robô Arduino controlado por fala
- Microbot baseado em Arduino Nano
- Carro RC com engenharia reversa para fazer um Arduino Rover
- 2WD Extend Platform Arduino Robot Chassis Smart Car Chassis
- Arduino Robot 4WD Smart Car Chassis Kits com um codificador de velocidade
- The Hexbug Spider Hack
- Stompy, o robô ambulante
- Arduino Bot Proto
- Robô Arduino para testar o Whiley
- Robô com autobalanceamento de 2 rodas usando Arduino e MPU6050
Projetos de Engenharia Eletrônica
Em nossa vida diária, a eletrônica desempenha um papel importante. Portanto, se aprendermos algumas coisas básicas sobre eletrônica, isso será favorável para nós. Esses projetos eletrônicos lidam com vários circuitos que podem incluir conceitos como capacitores, diodos, ICs, etc. Muitas pessoas agora estão mostrando interesse em vários ramos da engenharia eletrônica. Depois de fazer alguns projetos no ramo de engenharia eletrônica, podemos ganhar conhecimento prático de eletrônica. Para aqueles que estão interessados em projetos eletrônicos, a seguinte lista de projetos e ideias de engenharia eletrônica seria útil.
- Automação residencial baseada em Arduino
- Transferência de energia sem fio no espaço 3D
- Controlador de bomba de líquido industrial com intervalos de tempo definidos pelo usuário com base no temporizador
- Controle automático de intensidade de luzes de rua baseado em Arduino
- DC de alta tensão por Princípios do gerador de Marx
- Sistema de segurança eletrônico controlado por olho
- Longo alcance Transmissor FM com modulação de áudio
- Carga Operada por Relé Baseada em Atraso
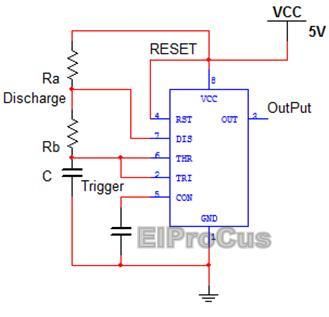
- Aumentar 6 V DC para 10 V DC usando o temporizador 555
- Verificador de sequência de fases para fornecimento trifásico
- Detector de incêndio ou fumaça com sistema automático de irrigação de água
- Sistema Pump On e Off baseado em GSM / GPRS
- Sistema IVRS controlado por telefone móvel
- Sistema de controle automático de iluminação pública usando LDR de alta sensibilidade
- Regulação automática de velocidade dependendo do veículo de entrada em vias altas
- Aplicações de Robôs
- Os aplicativos do robô podem ser classificados em dois tipos: aplicativos atuais e aplicativos futuros.
- Os aplicativos atuais incluem:
- Transferência de material, carregamento e descarregamento da máquina
- Operações de processamento
- Montagem e inspeção
- As aplicações futuras incluem:
- Médico
- Artilharia militar, carregamento, vigilância
- Aplicativos domésticos
- Industria eletronica
- Oficina de máquinas totalmente automatizada
Trata-se de uma lista de projetos de robótica, como Projetos de robótica com base em microcontroladores econômicos, projetos de robótica simples, projetos de robótica com Arduino e projetos de robótica para estudantes de engenharia. Esperamos que você tenha um melhor entendimento e conceito de projetos de robótica baseados em microcontroladores. Compartilhe sua opinião sobre este artigo na seção de comentários abaixo e, para obter mais ajuda na implementação desses projetos, entre em contato conosco.
Créditos fotográficos:
- Projetos de robótica usando microcontrolador por Daihen-usa
- Robôs Industriais por linkic
- Projetos de robótica para estudantes de engenharia por hub de eletronicos
- Projetos de Robótica Simples por nootrix
- Projetos do robô Arduino por rlocman





{kind=link}