Um robô pick and place é aquele que é usado para pegar um objeto e colocá-lo no local desejado. Pode ser um robô cilíndrico proporcionando movimento nos eixos horizontal, vertical e rotacional, um robô esférico proporcionando dois movimentos rotacionais e um linear, um robô articulado ou um robô scara (robôs fixos com braços rotativos de 3 eixos verticais).
Vantagens
Antes de prosseguirmos, vamos ver alguns motivos pelos quais robôs pick and place são preferidos:
- Eles são mais rápidos e podem fazer o trabalho em segundos em comparação com seus colegas humanos.
- São flexíveis e possuem design adequado.
- Eles são precisos.
- Eles aumentam a segurança do ambiente de trabalho e nunca se cansam.
Partes de um robô Pick N Place

Escolha N Place Robot
Vamos ver em que consiste o robô de escolha e colocação:
- Para Rover : É o corpo principal do robô constituído por vários corpos rígidos como um cilindro ou uma esfera, juntas e ligações. Também é conhecido como manipulador.
- End Effector : É o corpo conectado à última junta do rover que é utilizado para o propósito de agarrar ou manusear objetos. Pode ser uma analogia com o braço de um ser humano.
- Atuadores : Eles são os motoristas do robô. Na verdade, ele aciona o robô. Pode ser qualquer motor, como servo motor, motor de passo ou cilindros pneumáticos ou hidráulicos.
- Sensores: Eles são usados para detectar o estado interno e externo, para garantir que o robô funcione perfeitamente como um todo. Os sensores envolvem sensores de toque, sensor IR etc.
- Controlador : É usado para controlar os atuadores com base no feedback do sensor e, assim, controlar o movimento de cada junta e, eventualmente, o movimento do efetor final.
Trabalho de um robô Pick N Place básico:
A função básica de um escolha e coloque o robô é feito por suas articulações. As articulações são análogas às articulações humanas e são usadas para unir os dois corpos rígidos consecutivos no robô. Eles podem ser junta rotativa ou junta linear. Para adicionar uma junta a qualquer link de um robô, precisamos saber sobre os graus de liberdade e de movimento dessa parte do corpo. Os graus de liberdade implementam o movimento linear e rotacional do corpo e os graus de movimento indicam o número de eixos que o corpo pode mover.

Um simples robô Pick N Place
Um simples robô pick and place consiste em dois corpos rígidos em uma base móvel, conectados entre si por uma junta rotativa. Uma junta rotativa é aquela que fornece rotação em 360 graus em torno de qualquer um dos eixos.
- O fundo ou a base são fixados com rodas que fornecem movimento linear.
- O 1stcorpo rígido é fixo e suporta o segundo corpo rígido ao qual o efetor final é fornecido.
- O 2WLo corpo rígido é fornecido com movimento em todos os 3 eixos e possui 3 graus de liberdade. Ele está conectado ao 1stcorpo com junta rotativa.
- O efetor final deve acomodar todos os 6 graus de liberdade, a fim de alcançar todos os lados do componente, para assumir posição em qualquer altura.
Em geral, o robô básico de escolha e colocação funciona da seguinte maneira:
- As rodas embaixo da base ajudam a mover o robô até o local desejado.
- O corpo rígido que suporta o efetor final dobra ou se endireita para chegar à posição onde o objeto é colocado.
- O efetor final pega o objeto com uma pegada forte e o coloca na posição desejada.
Agora que temos uma breve ideia do robô pick and place, a questão básica é como ele é realmente controlado.
Um simples robô pick and place pode ser controlado controlando o movimento de seu efetor final. O movimento pode ser usando movimento hidráulico, ou seja, usando fluido hidráulico sob pressão para conduzir o robô, ou usando movimento pneumático, ou seja, usando ar pressurizado para causar movimento mecânico. No entanto, a maneira mais eficaz é usar motores para fornecer o movimento necessário. Os motores devem ser controlados para fornecer o movimento necessário ao robô e ao efetor final.
Exemplo de trabalho de controle de um robô Pick N Place
Que tal controlar o robô com apenas alguns botões no teclado? Sim, é possível! Apenas pressionando o botão necessário, podemos transmitir o comando ao robô para fazê-lo se mover em qualquer direção para realizar nossa tarefa. Além disso, isso pode ser alcançado usando uma comunicação sem fio simples.
Vamos ver como isso realmente funciona:
A parte do transmissor consiste no teclado conectado ao microcontrolador. Qualquer número de botão em formato decimal é convertido em binário de 4 dígitos pelo microcontrolador e a saída paralela em uma de suas portas é aplicada ao codificador. O codificador converte esses dados paralelos em dados seriais e estes são alimentados ao transmissor, equipado com uma antena para transmitir os dados seriais.

Diagrama de blocos mostrando o transmissor de um robô Pick N Place
O lado do receptor consiste em um decodificador conectado ao microcontrolador. O decodificador converte o comando recebido em formato serial para a forma paralela e passa esses dados para o microcontrolador. Com base neste comando, o microcontrolador envia os sinais de entrada apropriados para os drivers do motor para acionar os respectivos motores.

Diagrama de blocos mostrando o receptor de um robô Pick N Place
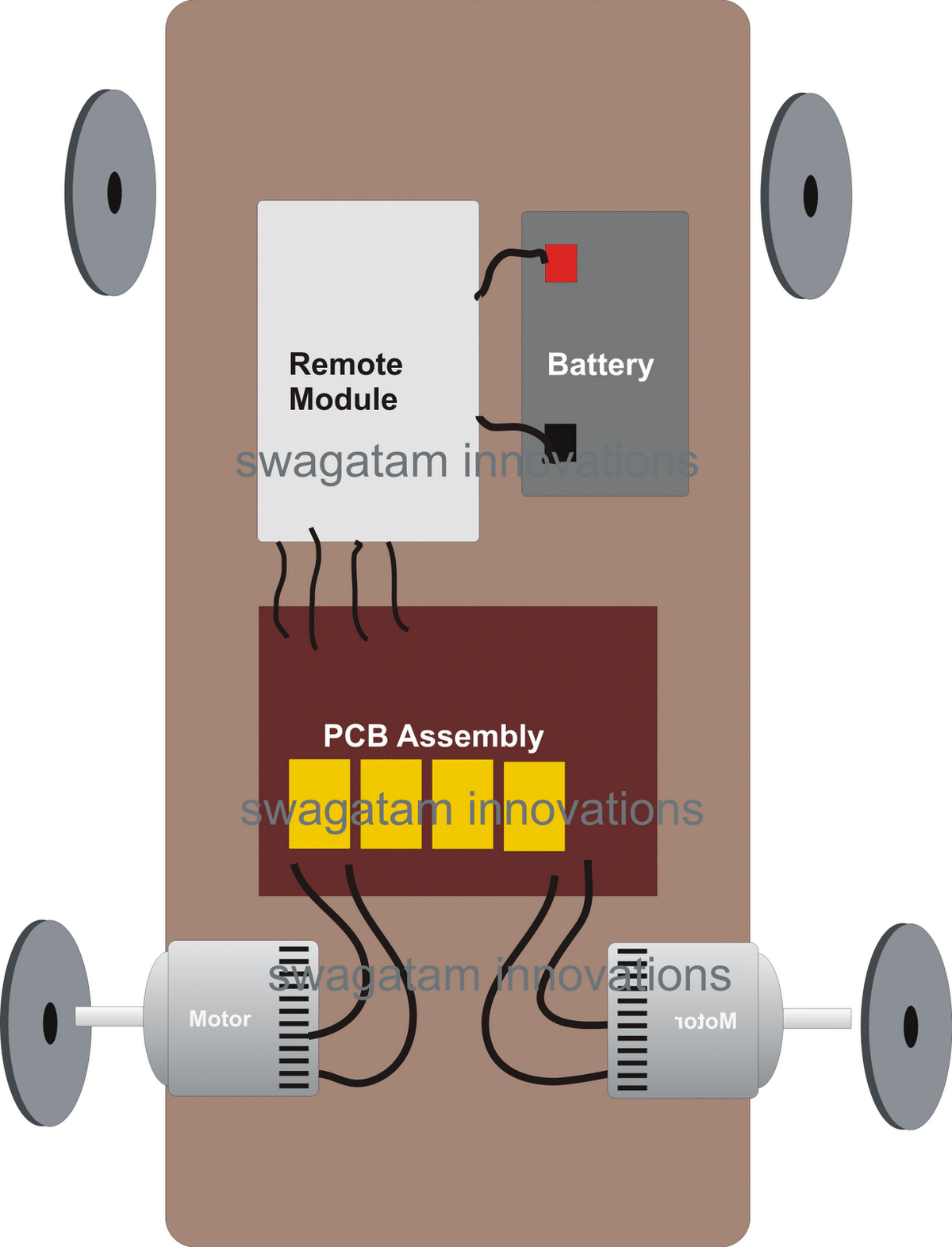
O sistema consiste em dois motores para fornecer movimento a todo o robô e dois outros motores para fornecer o movimento do braço. O efetor final ou a garra precisa ser controlada para aplicar a pressão adequada no objeto para manuseá-lo com eficácia, para dar-lhe uma pegada macia . Isso é garantido pelo controle dos motores do braço por meio do comando adequado. A saída dos motores do braço é conectada a um resistor de 10Ohms / 2W e no momento da sobrecarga do motor ou condição travada, uma alta tensão é desenvolvida através do resistor, o que causa um nível lógico alto na saída do optoisolador e na interrupção O pino do microcontrolador conectado à saída do optoisolador por meio de um transistor pnp obtém um sinal lógico baixo, que interrompe todas as outras operações da pinça.
Assim, por meio de comunicação RF simples, podemos realmente controlar um robô pick and place.
Aplicações práticas do robô pick and place:
- Aplicações de defesa : Pode ser usado para vigilância e também para recolher objetos nocivos como bombas e difundi-los com segurança.
- Aplicações industriais : Esses robôs são usados na fabricação, para pegar as peças necessárias e colocá-las na posição correta para completar a fixação do maquinário. Também pode ser usado para colocar objetos na correia transportadora, bem como recolher produtos defeituosos da correia transportadora.
- Aplicações Médicas : Esses robôs podem ser usados em várias operações cirúrgicas, como em operações de substituição de articulações, cirurgias ortopédicas e internas. Ele executa as operações com mais precisão e exatidão.
Além dessas aplicações, esses robôs também podem ser usados em várias outras aplicações adequadas à humanidade.
Agora a questão permanece: até onde vai o dia em que os robôs irão facilitar completamente o caminho para os humanos?